Yaw Pitch Roll Vector . we want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. is it possible to find the unit vector with: euler angle visualization tool. if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. roll pitch yaw (rpy) convention. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. to obtain the expression of the gravitational vector in the body frame, you first obtain the quaternion corresponding to the three consecutive euler angles.
from www.machinedesign.com
to obtain the expression of the gravitational vector in the body frame, you first obtain the quaternion corresponding to the three consecutive euler angles. roll pitch yaw (rpy) convention. we want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. is it possible to find the unit vector with: given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. euler angle visualization tool. if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a.
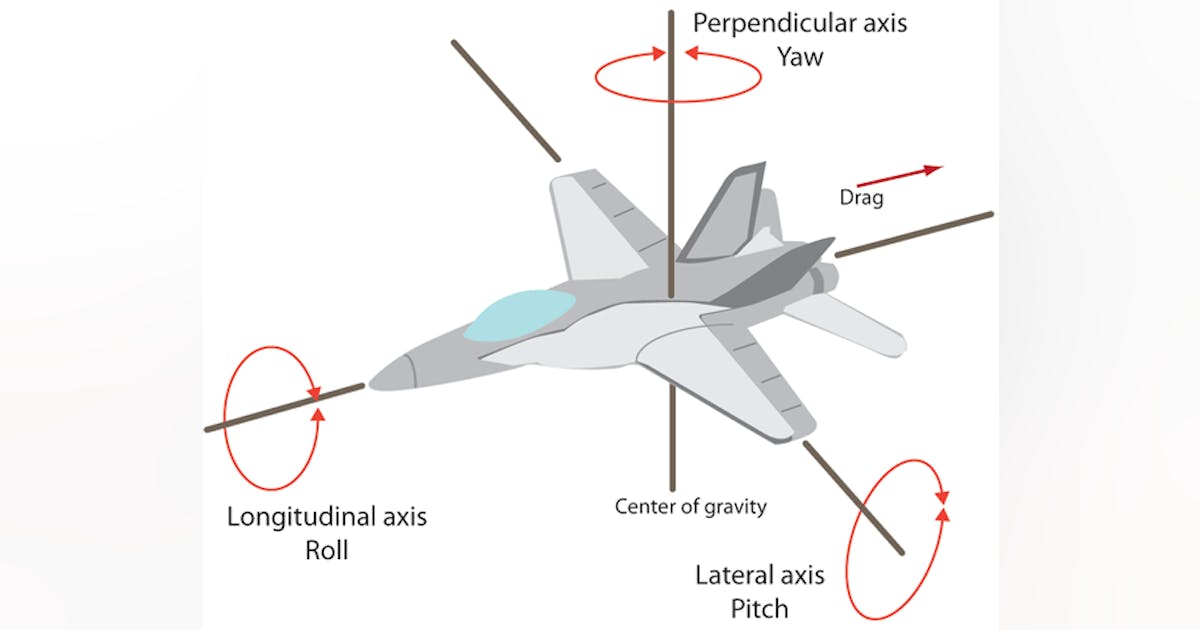
What’s the Difference Between Pitch, Roll, and Yaw? Machine Design
Yaw Pitch Roll Vector to obtain the expression of the gravitational vector in the body frame, you first obtain the quaternion corresponding to the three consecutive euler angles. given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. we want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. to obtain the expression of the gravitational vector in the body frame, you first obtain the quaternion corresponding to the three consecutive euler angles. roll pitch yaw (rpy) convention. is it possible to find the unit vector with: euler angle visualization tool.
From www.xsimulator.net
Request (Feature) Why the rotations(pitch,yaw and roll)are angles in Yaw Pitch Roll Vector if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. to obtain the expression of the gravitational vector in the body frame, you first. Yaw Pitch Roll Vector.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Yaw Pitch Roll Vector Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. roll pitch yaw (rpy) convention. to obtain the expression of. Yaw Pitch Roll Vector.
From www.youtube.com
Pitch, Roll and Yaw in Orthodontics kapdentlectures YouTube Yaw Pitch Roll Vector is it possible to find the unit vector with: to obtain the expression of the gravitational vector in the body frame, you first obtain the quaternion corresponding to the three consecutive euler angles. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. we want to give. Yaw Pitch Roll Vector.
From www.researchgate.net
Definition of yaw and pitch rotations from zeroDoppler coordinate Yaw Pitch Roll Vector Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. roll pitch yaw (rpy) convention. euler angle visualization tool. to obtain the expression of the gravitational vector in the body frame, you first obtain the quaternion corresponding to the three consecutive euler angles. we want to. Yaw Pitch Roll Vector.
From www.machinedesign.com
What’s the Difference Between Pitch, Roll, and Yaw? Machine Design Yaw Pitch Roll Vector given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. is it possible to find the. Yaw Pitch Roll Vector.
From www.researchgate.net
Illustration of ship motion, showing roll, pitch, and yaw, the three Yaw Pitch Roll Vector if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. is it possible to find the unit vector with: given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0,. Yaw Pitch Roll Vector.
From blog.csdn.net
pitch yaw roll是什么_yaw pitch rollCSDN博客 Yaw Pitch Roll Vector is it possible to find the unit vector with: given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. we want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new. Yaw Pitch Roll Vector.
From www.researchgate.net
1 Roll, yaw and pitch motion of a moving vessel. The same motions apply Yaw Pitch Roll Vector if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. we want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. given a yaw angle ϕ and a pitch angle θ we. Yaw Pitch Roll Vector.
From songho.ca
OpenGL Camera Yaw Pitch Roll Vector Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. euler angle visualization tool. given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. to obtain the expression of the. Yaw Pitch Roll Vector.
From www.alamy.com
Roll Pitch Yaw Stock Photo Alamy Yaw Pitch Roll Vector roll pitch yaw (rpy) convention. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. is it possible to find the unit vector. Yaw Pitch Roll Vector.
From automaticaddison.com
Yaw, Pitch, and Roll Diagrams Using 2D Coordinate Systems Automatic Yaw Pitch Roll Vector we want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. euler angle visualization tool. Rotation about x0 of. Yaw Pitch Roll Vector.
From www.mdpi.com
Sensors Free FullText Estimation of Wave Period from Pitch and Yaw Pitch Roll Vector roll pitch yaw (rpy) convention. is it possible to find the unit vector with: given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. euler angle visualization tool. if on the other hand you want to take a. Yaw Pitch Roll Vector.
From howthingsfly.si.edu
Pitch, Roll, and Yaw How Things Fly Yaw Pitch Roll Vector given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. Rotation about x0 of angle g +. Yaw Pitch Roll Vector.
From www.researchgate.net
Yaw, pitch and roll rotations of a Quadcopter [7]. Download Yaw Pitch Roll Vector to obtain the expression of the gravitational vector in the body frame, you first obtain the quaternion corresponding to the three consecutive euler angles. if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. roll pitch yaw (rpy) convention. euler angle visualization. Yaw Pitch Roll Vector.
From www.grc.nasa.gov
Aircraft Yaw Motion Yaw Pitch Roll Vector if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. roll pitch yaw (rpy) convention. to obtain the expression of the gravitational vector in the body frame, you first obtain the quaternion corresponding to the three consecutive euler angles. we want to. Yaw Pitch Roll Vector.
From aviatechchannel.com
Understanding Aircraft Roll, Pitch, Yaw Axes Yaw Pitch Roll Vector is it possible to find the unit vector with: Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. euler angle visualization tool. if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix.. Yaw Pitch Roll Vector.
From siafstephenhoward.blogspot.com
3d roll pitch yaw Yaw Pitch Roll Vector if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. we want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. given a yaw angle ϕ and a pitch angle θ we. Yaw Pitch Roll Vector.
From sadhikamaja.blogspot.com
Yaw Pitch Roll SadhikaMaja Yaw Pitch Roll Vector roll pitch yaw (rpy) convention. euler angle visualization tool. is it possible to find the unit vector with: Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w). Yaw Pitch Roll Vector.
From www.youtube.com
Correct Explanation of Yaw, Pitch, and Roll Euler Angles with Rotation Yaw Pitch Roll Vector Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. we want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. roll pitch yaw (rpy) convention. if on the other hand you want to take a. Yaw Pitch Roll Vector.
From avopix.com
Yaw, pitch and roll in an aircraft Royalty Free Stock Vector Yaw Pitch Roll Vector given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. if on the other hand you want to take a given. Yaw Pitch Roll Vector.
From animalia-life.club
Roll Pitch Yaw Camera Clipart Yaw Pitch Roll Vector euler angle visualization tool. to obtain the expression of the gravitational vector in the body frame, you first obtain the quaternion corresponding to the three consecutive euler angles. roll pitch yaw (rpy) convention. if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation. Yaw Pitch Roll Vector.
From www.droneybee.com
ROLL, PITCH, YAW Yaw Pitch Roll Vector Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. we want to give the aircraft a set of yaw, pitch. Yaw Pitch Roll Vector.
From www.vectorstock.com
Roll pitch yaw three rotation angles Royalty Free Vector Yaw Pitch Roll Vector given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. roll pitch yaw (rpy) convention. . Yaw Pitch Roll Vector.
From sites.google.com
Instrumentation The Smart Gimbal Yaw Pitch Roll Vector to obtain the expression of the gravitational vector in the body frame, you first obtain the quaternion corresponding to the three consecutive euler angles. we want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. is it possible to find the unit vector with: euler. Yaw Pitch Roll Vector.
From www.shutterstock.com
Aviation Concept Axis Movement Three Dimensional Stock Vector 191329868 Yaw Pitch Roll Vector Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. roll pitch yaw (rpy) convention. if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. given a yaw angle ϕ and a pitch. Yaw Pitch Roll Vector.
From 2017.help.altair.com
PITCH Yaw Pitch Roll Vector to obtain the expression of the gravitational vector in the body frame, you first obtain the quaternion corresponding to the three consecutive euler angles. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. roll pitch yaw (rpy) convention. if on the other hand you want to. Yaw Pitch Roll Vector.
From www.vectornav.com
Attitude representation in inertial navigation · VectorNav Yaw Pitch Roll Vector euler angle visualization tool. we want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. if on the other hand you want to take a given vector and transform it by these angles, you're looking for a rotation matrix. Rotation about x0 of angle g +. Yaw Pitch Roll Vector.
From space.stackexchange.com
artificial satellite Determine Yaw, Pitch, Roll from two vectors Yaw Pitch Roll Vector euler angle visualization tool. roll pitch yaw (rpy) convention. given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. if on the other hand you want to take a given vector and transform it by these angles, you're looking. Yaw Pitch Roll Vector.
From exohljfkj.blob.core.windows.net
Yaw Pitch Roll Orthodontics at Melony Harrelson blog Yaw Pitch Roll Vector to obtain the expression of the gravitational vector in the body frame, you first obtain the quaternion corresponding to the three consecutive euler angles. we want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. roll pitch yaw (rpy) convention. Rotation about x0 of angle g. Yaw Pitch Roll Vector.
From www.grc.nasa.gov
Rocket Rotations Yaw Pitch Roll Vector euler angle visualization tool. is it possible to find the unit vector with: Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. roll pitch yaw (rpy) convention. given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w). Yaw Pitch Roll Vector.
From www.researchgate.net
Orientation of the head in terms of pitch, roll, and yaw movements Yaw Pitch Roll Vector euler angle visualization tool. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. given a yaw angle ϕ and a pitch angle θ we transform the direction vector (u, v, w) onto the view axis (1, 0, 0) by first. if on the other hand you. Yaw Pitch Roll Vector.
From postcompetitiveinsight.com
Pitch, Yaw, and Roll POST COMPETITIVE INSIGHT Yaw Pitch Roll Vector Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. to obtain the expression of the gravitational vector in the body frame, you first obtain the quaternion corresponding to the three consecutive euler angles. euler angle visualization tool. if on the other hand you want to take. Yaw Pitch Roll Vector.
From velog.io
Rotation Yaw, Pitch, Roll Yaw Pitch Roll Vector is it possible to find the unit vector with: to obtain the expression of the gravitational vector in the body frame, you first obtain the quaternion corresponding to the three consecutive euler angles. euler angle visualization tool. roll pitch yaw (rpy) convention. Rotation about x0 of angle g + rotation about y0 of angle b +. Yaw Pitch Roll Vector.
From www.researchgate.net
(a) Pitch, yaw and roll angles of an aircraft with body orientation [Ω Yaw Pitch Roll Vector we want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. euler angle visualization tool. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. if on the other hand you want to take a given. Yaw Pitch Roll Vector.
From www.brightdevelopers.com
xyz_pitchyawroll bright developers Yaw Pitch Roll Vector Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. is it possible to find the unit vector with: we want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. to obtain the expression of the. Yaw Pitch Roll Vector.