Gazebo Garden Ros2 . In this tutorial we will learn how to use ros 2 to communicate with gazebo. We can receive data (like joint states,. This can help in many aspects; Embed ros 2 directly in a gazebo. Gazebo garden can be used with ros 2 iron and non ros official binary packages hosted in packages.osrfoundation.org. Learn gazebo sim garden, the new generation of simulation software from open robotics, and how to seamlessly use it with ros2. Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. Connecting gazebo and ros 2 use ros_gz_bridge to dynamically connect topics between ros 2 and gazebo. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. In this tutorial, you launched a robot simulation with gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot.
from velog.io
Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. In this tutorial, you launched a robot simulation with gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Embed ros 2 directly in a gazebo. This can help in many aspects; In this tutorial we will learn how to use ros 2 to communicate with gazebo. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. Connecting gazebo and ros 2 use ros_gz_bridge to dynamically connect topics between ros 2 and gazebo. We can receive data (like joint states,. Learn gazebo sim garden, the new generation of simulation software from open robotics, and how to seamlessly use it with ros2. Gazebo garden can be used with ros 2 iron and non ros official binary packages hosted in packages.osrfoundation.org.
ROS2 Gazebo
Gazebo Garden Ros2 In this tutorial, you launched a robot simulation with gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. This can help in many aspects; Connecting gazebo and ros 2 use ros_gz_bridge to dynamically connect topics between ros 2 and gazebo. Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. Learn gazebo sim garden, the new generation of simulation software from open robotics, and how to seamlessly use it with ros2. In this tutorial we will learn how to use ros 2 to communicate with gazebo. We can receive data (like joint states,. Embed ros 2 directly in a gazebo. Gazebo garden can be used with ros 2 iron and non ros official binary packages hosted in packages.osrfoundation.org. In this tutorial, you launched a robot simulation with gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot.
From velog.io
ROS2 Gazebo Gazebo Garden Ros2 Connecting gazebo and ros 2 use ros_gz_bridge to dynamically connect topics between ros 2 and gazebo. We can receive data (like joint states,. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. Gazebo garden can be used with ros 2 iron and non ros official binary packages hosted in packages.osrfoundation.org.. Gazebo Garden Ros2.
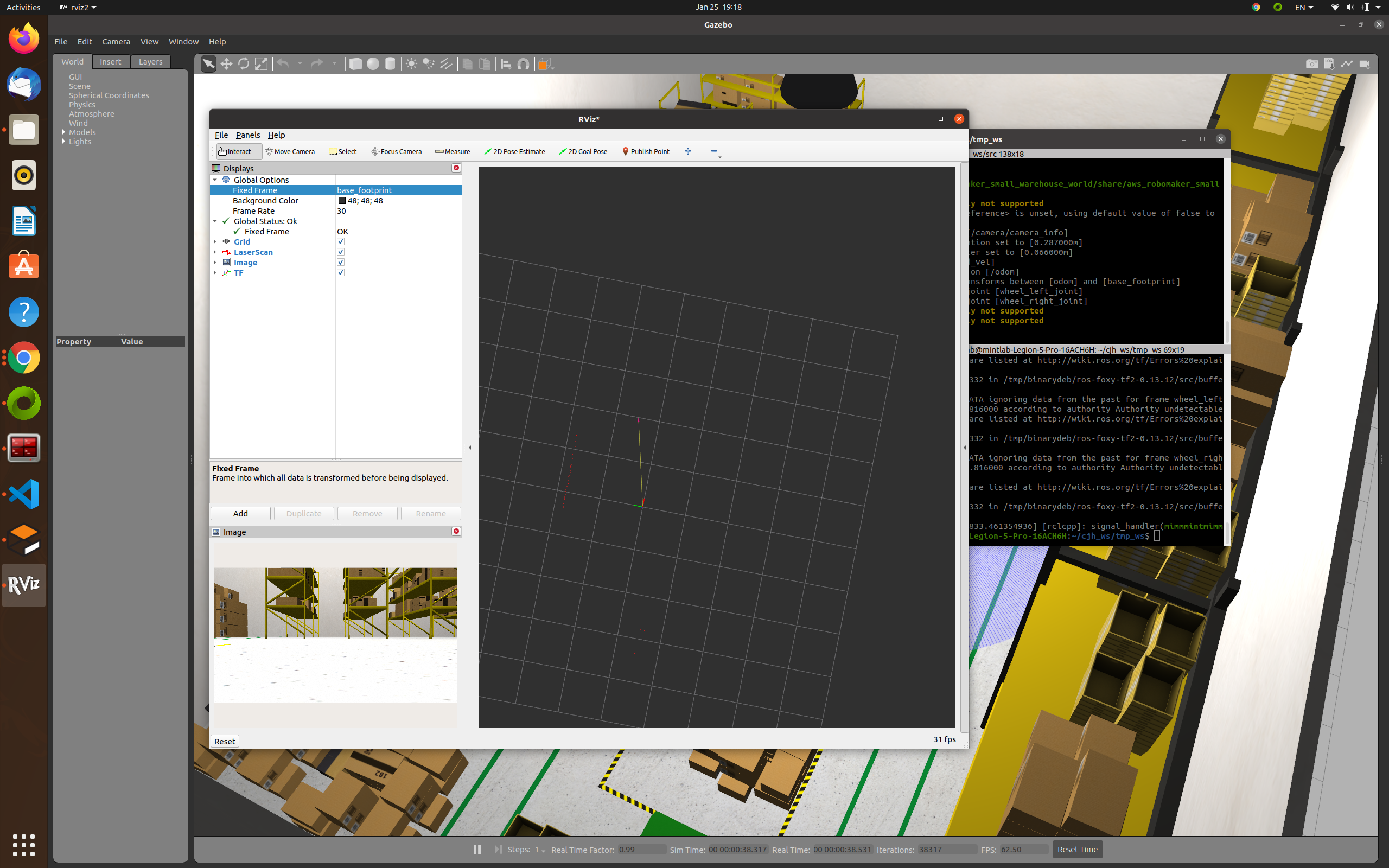
From roytravel.tistory.com
ROS2 launch 파일로 Gazebo와 Rviz2 실행하기 For a better world Gazebo Garden Ros2 Learn gazebo sim garden, the new generation of simulation software from open robotics, and how to seamlessly use it with ros2. In this tutorial we will learn how to use ros 2 to communicate with gazebo. In this tutorial, you launched a robot simulation with gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a. Gazebo Garden Ros2.
From www.homestratosphere.com
32 Garden Gazebos for Creating Your Garden Refuge Gazebo Garden Ros2 This can help in many aspects; Embed ros 2 directly in a gazebo. Connecting gazebo and ros 2 use ros_gz_bridge to dynamically connect topics between ros 2 and gazebo. Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. We can receive data (like joint states,. In. Gazebo Garden Ros2.
From www.pinterest.com
The Rose Garden Gazebo at Descanso Gardens....floral arrangement by Gazebo Garden Ros2 In this tutorial we will learn how to use ros 2 to communicate with gazebo. Embed ros 2 directly in a gazebo. This can help in many aspects; Learn gazebo sim garden, the new generation of simulation software from open robotics, and how to seamlessly use it with ros2. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package. Gazebo Garden Ros2.
From www.homestratosphere.com
32 Garden Gazebos for Creating Your Garden Refuge Gazebo Garden Ros2 The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. Connecting gazebo and ros 2 use ros_gz_bridge to dynamically connect topics between ros 2 and gazebo. In this tutorial, you launched a robot simulation with gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff. Gazebo Garden Ros2.
From www.contractors.com
7 Backyard Gazebo Ideas for Sun Shade and Rain Shelter Gazebo Garden Ros2 We can receive data (like joint states,. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. This can help in many aspects; Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. In this tutorial we will. Gazebo Garden Ros2.
From github.com
Ros2 navigation cannot work in simulation(Gazebo). · Issue 390 · ros Gazebo Garden Ros2 Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. We can receive data (like joint states,. Embed ros 2 directly in a gazebo. This can help in. Gazebo Garden Ros2.
From www.theconstructsim.com
[ROS2 Howto] 2 Create a ROS2 action server The Construct Gazebo Garden Ros2 This can help in many aspects; We can receive data (like joint states,. In this tutorial we will learn how to use ros 2 to communicate with gazebo. Connecting gazebo and ros 2 use ros_gz_bridge to dynamically connect topics between ros 2 and gazebo. Embed ros 2 directly in a gazebo. The turtlebot 3 package depends on gazebo_ros_pkgs, which is. Gazebo Garden Ros2.
From www.thebackyardshowcase.com
Outdoor Wooden Gazebos AmishBuilt Lancaster, PA The Backyard Gazebo Garden Ros2 The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. Embed ros 2 directly in a gazebo. We can receive data (like joint states,. Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. This can help in. Gazebo Garden Ros2.
From shedsplanskits.com
Gazebo Garden Shed Plans Building Wood Sheds Successfully Shed Gazebo Garden Ros2 In this tutorial we will learn how to use ros 2 to communicate with gazebo. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. Gazebo garden can be used with ros 2 iron and non ros official binary packages hosted in packages.osrfoundation.org. Assuming your ros 2 and gazebo environments have. Gazebo Garden Ros2.
From blog.csdn.net
Gazebo和ROS2的使用说明(部分翻译)_gazebo garden ros2CSDN博客 Gazebo Garden Ros2 Embed ros 2 directly in a gazebo. In this tutorial, you launched a robot simulation with gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. Gazebo garden can. Gazebo Garden Ros2.
From quad-robotics.gitbook.io
ROS2와 통합 GAZEBO 시뮬레이터 (Garden) Gazebo Garden Ros2 Embed ros 2 directly in a gazebo. We can receive data (like joint states,. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. Learn gazebo sim garden,. Gazebo Garden Ros2.
From github.com
GitHub monemati/PX4ROS2GazeboYOLOv8 Aerial Object Detection using Gazebo Garden Ros2 Connecting gazebo and ros 2 use ros_gz_bridge to dynamically connect topics between ros 2 and gazebo. In this tutorial we will learn how to use ros 2 to communicate with gazebo. We can receive data (like joint states,. Learn gazebo sim garden, the new generation of simulation software from open robotics, and how to seamlessly use it with ros2. Embed. Gazebo Garden Ros2.
From www.youtube.com
Simulating a Robot Using Gazebo and ROS 2 YouTube Gazebo Garden Ros2 Learn gazebo sim garden, the new generation of simulation software from open robotics, and how to seamlessly use it with ros2. Embed ros 2 directly in a gazebo. This can help in many aspects; We can receive data (like joint states,. In this tutorial we will learn how to use ros 2 to communicate with gazebo. Connecting gazebo and ros. Gazebo Garden Ros2.
From www.reddit.com
ROS / Gazebo Compatibility Guide r/ROS Gazebo Garden Ros2 We can receive data (like joint states,. This can help in many aspects; The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. In this tutorial we will. Gazebo Garden Ros2.
From www.infoq.com
Open Source Robotics Getting Started with Gazebo and ROS 2 Gazebo Garden Ros2 The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. Connecting gazebo and ros 2 use ros_gz_bridge to dynamically connect topics between ros 2 and gazebo. Learn gazebo sim garden, the new generation of simulation software from open robotics, and how to seamlessly use it with ros2. Embed ros 2 directly. Gazebo Garden Ros2.
From github.com
The ros2 branch is compatible with Gazebo Garden forward but README Gazebo Garden Ros2 In this tutorial, you launched a robot simulation with gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. Learn gazebo sim garden, the new generation of simulation software from open robotics, and. Gazebo Garden Ros2.
From homesfornh.com
Wooden Garden Gazebo Ideas, Beautiful and Cozy Atmosphere HomesFornh Gazebo Garden Ros2 Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. In this tutorial we will learn how to use ros 2 to communicate with gazebo. Gazebo garden can. Gazebo Garden Ros2.
From www.youtube.com
Foodie Adventure to Gazebo Gardens in Fresno YouTube Gazebo Garden Ros2 This can help in many aspects; In this tutorial we will learn how to use ros 2 to communicate with gazebo. Embed ros 2 directly in a gazebo. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. Assuming your ros 2 and gazebo environments have been properly setup and built,. Gazebo Garden Ros2.
From velog.io
ROS2 Gazebo Gazebo Garden Ros2 Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. In this tutorial we will learn how to use ros 2 to communicate with gazebo. This can help. Gazebo Garden Ros2.
From answers.gazebosim.org
[ROS2] Setting initial joint position at spawn Gazebo Q&A Forum Gazebo Garden Ros2 Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. In this tutorial, you launched a robot simulation with gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. In this tutorial we will learn how to use ros. Gazebo Garden Ros2.
From www.youtube.com
Simulation of a 4WS Robot Using ROS2 Control and Gazebo YouTube Gazebo Garden Ros2 In this tutorial, you launched a robot simulation with gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Learn gazebo sim garden, the new generation of simulation software from open robotics, and how to seamlessly use it with ros2. We can receive data (like joint states,. Assuming your ros 2 and. Gazebo Garden Ros2.
From www.youtube.com
ROS2 Gazebo Example YouTube Gazebo Garden Ros2 In this tutorial, you launched a robot simulation with gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. Gazebo garden can be used with ros 2 iron and. Gazebo Garden Ros2.
From robotics.stackexchange.com
ros humble Get robot position wrt world frame in ROS2Gazebo Garden Gazebo Garden Ros2 Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. Connecting gazebo and ros 2 use ros_gz_bridge to dynamically connect topics between ros 2 and gazebo. Gazebo garden can be used with ros 2 iron and non ros official binary packages hosted in packages.osrfoundation.org. This can help. Gazebo Garden Ros2.
From blog.csdn.net
Gazebo和ROS2的使用说明(部分翻译)_gazebo 模型翻译CSDN博客 Gazebo Garden Ros2 In this tutorial we will learn how to use ros 2 to communicate with gazebo. Gazebo garden can be used with ros 2 iron and non ros official binary packages hosted in packages.osrfoundation.org. Embed ros 2 directly in a gazebo. Learn gazebo sim garden, the new generation of simulation software from open robotics, and how to seamlessly use it with. Gazebo Garden Ros2.
From quad-robotics.gitbook.io
ROS2와 통합 gz sim Tutorial Gazebo Garden Ros2 In this tutorial, you launched a robot simulation with gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the. Gazebo Garden Ros2.
From app.theconstructsim.com
Gazebo Sim with ROS2 handson Open Class The Construct Gazebo Garden Ros2 Embed ros 2 directly in a gazebo. In this tutorial we will learn how to use ros 2 to communicate with gazebo. Learn gazebo sim garden, the new generation of simulation software from open robotics, and how to seamlessly use it with ros2. Connecting gazebo and ros 2 use ros_gz_bridge to dynamically connect topics between ros 2 and gazebo. Gazebo. Gazebo Garden Ros2.
From www.youtube.com
Gazebo Sim with ROS2 ROS2 Developers Open Class 177 YouTube Gazebo Garden Ros2 Learn gazebo sim garden, the new generation of simulation software from open robotics, and how to seamlessly use it with ros2. Connecting gazebo and ros 2 use ros_gz_bridge to dynamically connect topics between ros 2 and gazebo. Gazebo garden can be used with ros 2 iron and non ros official binary packages hosted in packages.osrfoundation.org. The turtlebot 3 package depends. Gazebo Garden Ros2.
From www.gazebo.com
Custom Wood Gazebos for Sale Country Lane Gazebos Gazebo Garden Ros2 The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. In this tutorial we will learn how to use ros 2 to communicate with gazebo. Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. Gazebo garden can. Gazebo Garden Ros2.
From www.youtube.com
Segway simulation in Gazebo using ROS2 YouTube Gazebo Garden Ros2 We can receive data (like joint states,. In this tutorial, you launched a robot simulation with gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Gazebo garden can be used with ros 2 iron and non ros official binary packages hosted in packages.osrfoundation.org. Learn gazebo sim garden, the new generation of. Gazebo Garden Ros2.
From robotics.stackexchange.com
Issue with ROS2 Control [Humble] and Gazebo Garden Plugin Loading Gazebo Garden Ros2 We can receive data (like joint states,. Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. Gazebo garden can be used with ros 2 iron and non ros official binary packages hosted in packages.osrfoundation.org. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that. Gazebo Garden Ros2.
From github.com
GitHub gazebosim/ros_gz Integration between ROS (1 and 2) and Gazebo Gazebo Garden Ros2 Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. We can receive data (like joint states,. Embed ros 2 directly in a gazebo. Gazebo garden can be used with ros 2 iron and non ros official binary packages hosted in packages.osrfoundation.org. The turtlebot 3 package depends. Gazebo Garden Ros2.
From discourse.ros.org
Pick & Place in Gazebo with Nav2 and Moveit2 ROS Projects ROS Discourse Gazebo Garden Ros2 Gazebo garden can be used with ros 2 iron and non ros official binary packages hosted in packages.osrfoundation.org. Assuming your ros 2 and gazebo environments have been properly setup and built, you should now be able to load gazebo worlds which. Embed ros 2 directly in a gazebo. In this tutorial we will learn how to use ros 2 to. Gazebo Garden Ros2.
From mpolinowski.github.io
ROS2 Gazebo Robot Simulation Mike Polinowski Gazebo Garden Ros2 This can help in many aspects; We can receive data (like joint states,. The turtlebot 3 package depends on gazebo_ros_pkgs, which is the package that provides launch files, plugins, and other utilities. Connecting gazebo and ros 2 use ros_gz_bridge to dynamically connect topics between ros 2 and gazebo. In this tutorial, you launched a robot simulation with gazebo, launched bridges. Gazebo Garden Ros2.
From www.pinterest.com
This amazing gazebo makeover is definitely an inspirational and Gazebo Garden Ros2 In this tutorial, you launched a robot simulation with gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Learn gazebo sim garden, the new generation of simulation software from open robotics, and how to seamlessly use it with ros2. This can help in many aspects; In this tutorial we will learn. Gazebo Garden Ros2.