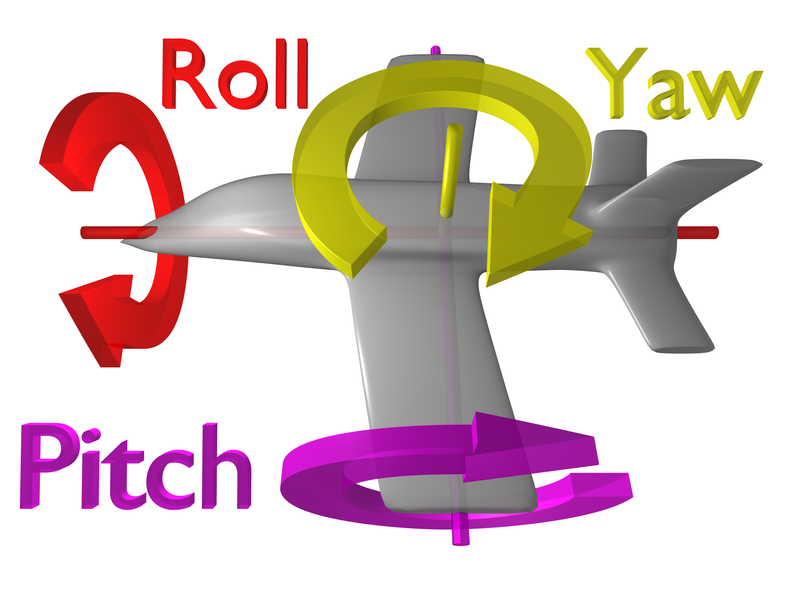
Yaw Pitch Roll Glm . i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. how to implement the roll angle together with yaw and pitch in glm::lookat function? i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions, you can use the. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. Pitch is the rotation that raises or lowers the front. current cglm ’s euler functions uses these convention: indeed, the 3 angles often have special names, based on common flight terminology:
from blog.csdn.net
how to implement the roll angle together with yaw and pitch in glm::lookat function? Pitch is the rotation that raises or lowers the front. indeed, the 3 angles often have special names, based on common flight terminology: i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions, you can use the. i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. current cglm ’s euler functions uses these convention:
pitch yaw roll是什么_yaw pitch rollCSDN博客
Yaw Pitch Roll Glm i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. current cglm ’s euler functions uses these convention: i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. how to implement the roll angle together with yaw and pitch in glm::lookat function? indeed, the 3 angles often have special names, based on common flight terminology: tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. Pitch is the rotation that raises or lowers the front. i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions, you can use the.
From sadhikamaja.blogspot.com
Yaw Pitch Roll SadhikaMaja Yaw Pitch Roll Glm indeed, the 3 angles often have special names, based on common flight terminology: tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. i've read multiple tutorials, but i still can't. Yaw Pitch Roll Glm.
From fyofiljpf.blob.core.windows.net
Yaw Pitch Roll Helicopter at Susan Hannon blog Yaw Pitch Roll Glm Pitch is the rotation that raises or lowers the front. i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions, you can use the. indeed, the 3 angles often have special names, based on common flight terminology: current cglm ’s euler functions uses these convention: i'm. Yaw Pitch Roll Glm.
From www.rmweb.co.uk
OO Gauge GWR Toplight Mainline & City Coaches announced Page 34 Yaw Pitch Roll Glm i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. Pitch is the rotation that raises or lowers the front. current cglm ’s euler functions uses these convention: tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. i'm not familiar. Yaw Pitch Roll Glm.
From www.vrogue.co
Download Measure Pitch Roll And Yaw Angles Using Mpu6 vrogue.co Yaw Pitch Roll Glm Pitch is the rotation that raises or lowers the front. i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. i'm not familiar with glm, but in the absence. Yaw Pitch Roll Glm.
From www.brightdevelopers.com
xyz_pitchyawroll bright developers Yaw Pitch Roll Glm tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions, you can use the. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x. Yaw Pitch Roll Glm.
From www.slideserve.com
PPT CSE 381 Advanced Game Programming 3D Mathematics PowerPoint Yaw Pitch Roll Glm i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. indeed, the 3 angles often have special names, based on common flight terminology: how to implement the roll angle together with yaw and pitch in glm::lookat function? Pitch is the rotation that raises or lowers the front.. Yaw Pitch Roll Glm.
From howthingsfly.si.edu
Pitch, Roll, and Yaw How Things Fly Yaw Pitch Roll Glm i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3. Yaw Pitch Roll Glm.
From www.alamyimages.fr
Pitch Roll Yaw Photo Stock Alamy Yaw Pitch Roll Glm i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. indeed, the 3 angles often have special names, based on common flight terminology: how to implement the roll angle together with yaw and pitch in glm::lookat function? current cglm ’s euler functions uses. Yaw Pitch Roll Glm.
From www.researchgate.net
Pitch, yaw and roll in X, Y, and Z axes Download Scientific Diagram Yaw Pitch Roll Glm indeed, the 3 angles often have special names, based on common flight terminology: how to implement the roll angle together with yaw and pitch in glm::lookat function? current cglm ’s euler functions uses these convention: i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. Pitch. Yaw Pitch Roll Glm.
From www.researchgate.net
Pitch, Roll and Yaw Against the XYZ Axis, own figure Download Yaw Pitch Roll Glm tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. current cglm ’s euler functions uses these convention: Pitch is the rotation that raises or lowers the front. indeed, the 3. Yaw Pitch Roll Glm.
From globalgaap.com.co
treten leeren Kreatur roll pitch yaw matrix Diskutieren Licht Pro Yaw Pitch Roll Glm how to implement the roll angle together with yaw and pitch in glm::lookat function? tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. indeed, the 3 angles often have special names, based on common flight terminology: i'm trying to figure out how to transform a pose given with euler angles. Yaw Pitch Roll Glm.
From www.liskeforensics.com
Vehicle Pitch, Roll and Yaw Liske Forensics Yaw Pitch Roll Glm tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. current cglm ’s euler functions uses these convention: Pitch is the rotation that raises or lowers the front. i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. . Yaw Pitch Roll Glm.
From hxeehsnrw.blob.core.windows.net
Yaw Pitch Roll Explained at Max Kelley blog Yaw Pitch Roll Glm i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions, you can use the. current cglm ’s euler functions uses these convention: i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. Pitch is the rotation that. Yaw Pitch Roll Glm.
From hxeehsnrw.blob.core.windows.net
Yaw Pitch Roll Explained at Max Kelley blog Yaw Pitch Roll Glm i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. how to implement the roll angle together with yaw and pitch in glm::lookat function? current cglm ’s euler functions uses these convention: indeed, the 3 angles often have special names, based on common. Yaw Pitch Roll Glm.
From www.youtube.com
Pitch Yaw Roll Explained YouTube Yaw Pitch Roll Glm i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions, you can use the. indeed, the 3 angles often have special names, based on common flight terminology: tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. i'm trying to figure. Yaw Pitch Roll Glm.
From blog.csdn.net
pitch yaw roll是什么_yaw pitch rollCSDN博客 Yaw Pitch Roll Glm i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. indeed, the 3 angles often have special names, based on common flight terminology: i'm not familiar with glm, but in the. Yaw Pitch Roll Glm.
From sadhikamaja.blogspot.com
Yaw Pitch Roll SadhikaMaja Yaw Pitch Roll Glm i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions, you can use the. how to implement the roll angle together with yaw and pitch in glm::lookat function? i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis),. Yaw Pitch Roll Glm.
From sadhikamaja.blogspot.com
Yaw Pitch Roll SadhikaMaja Yaw Pitch Roll Glm current cglm ’s euler functions uses these convention: i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. how to implement the roll angle together with yaw and pitch in glm::lookat function? i'm trying to figure out how to transform a pose given. Yaw Pitch Roll Glm.
From www.myxxgirl.com
Pitch Roll Yaw Def My XXX Hot Girl Yaw Pitch Roll Glm how to implement the roll angle together with yaw and pitch in glm::lookat function? Pitch is the rotation that raises or lowers the front. i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions, you can use the. tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t. Yaw Pitch Roll Glm.
From fstoppers.com
Why You Should Discover the Strange Effects Roll, Pitch, and Yaw Have Yaw Pitch Roll Glm how to implement the roll angle together with yaw and pitch in glm::lookat function? tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. indeed, the 3 angles often have special names, based on common flight terminology: Pitch is the rotation that raises or lowers the front. i'm trying to figure. Yaw Pitch Roll Glm.
From aviatechchannel.com
Understanding Aircraft Roll, Pitch, Yaw Axes Yaw Pitch Roll Glm Pitch is the rotation that raises or lowers the front. indeed, the 3 angles often have special names, based on common flight terminology: current cglm ’s euler functions uses these convention: i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. i'm not. Yaw Pitch Roll Glm.
From velog.io
[UE5] Roll, Pitch, Yaw Yaw Pitch Roll Glm i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. current cglm ’s euler functions uses these convention: i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions, you can use the. tmat4x4< t, defaultp >. Yaw Pitch Roll Glm.
From www.youtube.com
Tutorial EZPhysics Yaw Pitch & Roll YouTube Yaw Pitch Roll Glm tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. indeed, the 3 angles often have special names, based on common flight terminology: current cglm ’s euler functions uses these convention: i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions,. Yaw Pitch Roll Glm.
From highsierrapilots.club
rollpitchyawdiagram High Sierra Pilots Yaw Pitch Roll Glm Pitch is the rotation that raises or lowers the front. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. indeed, the 3 angles. Yaw Pitch Roll Glm.
From zhuanlan.zhihu.com
21>>opengl,,将target改成pitch,yaw,roll描述镜头方向 知乎 Yaw Pitch Roll Glm i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. Pitch is the rotation that raises or lowers the front. i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions, you can use the. how to implement. Yaw Pitch Roll Glm.
From www.reddit.com
Can we get a pitch, yaw & roll adjustment option to do this please r Yaw Pitch Roll Glm tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis),. Yaw Pitch Roll Glm.
From fstoppers.com
Why You Should Discover the Strange Effects Roll, Pitch, and Yaw Have Yaw Pitch Roll Glm i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. Pitch is the rotation that raises or lowers the front. tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. how to implement the roll angle together with yaw. Yaw Pitch Roll Glm.
From www.researchgate.net
Roll, pitch, and yaw following. Download Scientific Diagram Yaw Pitch Roll Glm indeed, the 3 angles often have special names, based on common flight terminology: current cglm ’s euler functions uses these convention: how to implement the roll angle together with yaw and pitch in glm::lookat function? i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. Pitch. Yaw Pitch Roll Glm.
From www.youtube.com
Pitch, Roll and Yaw in Orthodontics kapdentlectures YouTube Yaw Pitch Roll Glm tmat4x4< t, defaultp > glm::yawpitchroll(const t &yaw, const t &pitch, const t &roll) documentation from. i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into. Yaw Pitch Roll Glm.
From hxeqwjfzp.blob.core.windows.net
Calculation Yaw Pitch And Roll at Elizabeth Clemmer blog Yaw Pitch Roll Glm how to implement the roll angle together with yaw and pitch in glm::lookat function? i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. indeed, the 3 angles often have special names, based on common flight terminology: i've read multiple tutorials, but i still can't understand. Yaw Pitch Roll Glm.
From www.youtube.com
Measure Pitch Roll and Yaw Angles Using MPU6050 and Arduino YouTube Yaw Pitch Roll Glm Pitch is the rotation that raises or lowers the front. i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. indeed, the 3 angles. Yaw Pitch Roll Glm.
From zhuanlan.zhihu.com
21>>opengl,,将target改成pitch,yaw,roll描述镜头方向 知乎 Yaw Pitch Roll Glm i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions, you can use the. Pitch is the rotation that raises or lowers the front. i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. . Yaw Pitch Roll Glm.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Yaw Pitch Roll Glm i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions, you can use the. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch. i've read multiple tutorials, but i still can't understand how do i properly. Yaw Pitch Roll Glm.
From hxefebzpg.blob.core.windows.net
Yaw Pitch Roll Drivers Ed at Elizabeth Pryor blog Yaw Pitch Roll Glm current cglm ’s euler functions uses these convention: i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. i'm not familiar with glm, but in the absence of a function to directly convert from euler angles into quaternions, you can use the. how. Yaw Pitch Roll Glm.
From www.researchgate.net
2 Illustration of convention used for pitch, roll and yaw rotation Yaw Pitch Roll Glm current cglm ’s euler functions uses these convention: indeed, the 3 angles often have special names, based on common flight terminology: i've read multiple tutorials, but i still can't understand how do i properly rotate an object in 3d space on all 3 axis. how to implement the roll angle together with yaw and pitch in. Yaw Pitch Roll Glm.