Tool Calibration Point . The conventional tool center point calibration (tcp). Tool center points are critical when updating programs. Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user jogs the robot to several poses where the tool to be calibrated touches the same point from different orientations. Contact with reference parts, the use of distance. There are various methods for calibrating the tool center point (tcp). Calibration of a robot's tool center point using a laser displacement sensor abstract: The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given.
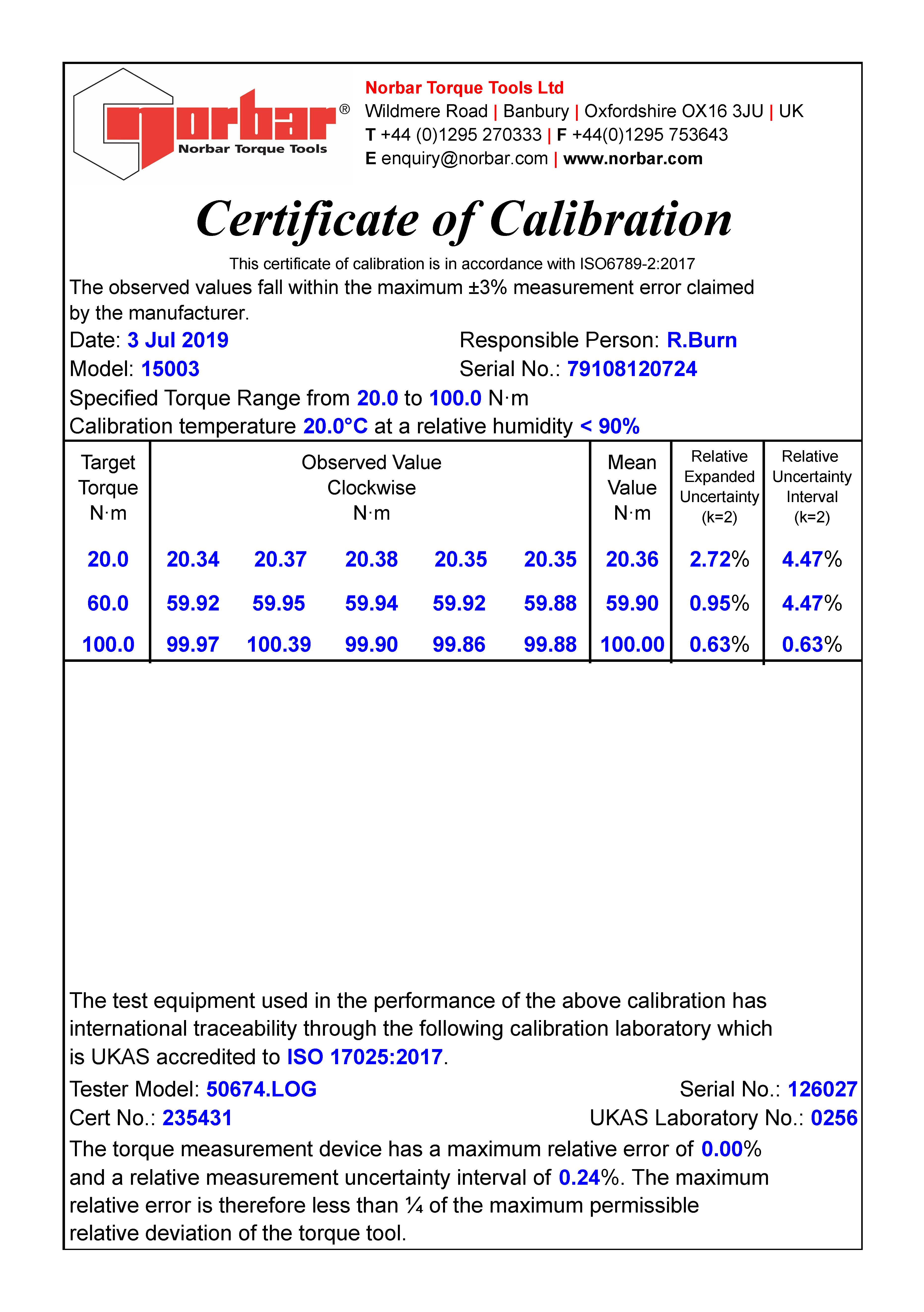
from www.norbar.com
Contact with reference parts, the use of distance. Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user jogs the robot to several poses where the tool to be calibrated touches the same point from different orientations. The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. Calibration of a robot's tool center point using a laser displacement sensor abstract: Tool center points are critical when updating programs. The conventional tool center point calibration (tcp). There are various methods for calibrating the tool center point (tcp).
Calibration Certificates
Tool Calibration Point Calibration of a robot's tool center point using a laser displacement sensor abstract: The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. Tool center points are critical when updating programs. Calibration of a robot's tool center point using a laser displacement sensor abstract: Contact with reference parts, the use of distance. Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user jogs the robot to several poses where the tool to be calibrated touches the same point from different orientations. The conventional tool center point calibration (tcp). There are various methods for calibrating the tool center point (tcp).
From www.arabcal.com
Mercury Triple Point Cell Calibration Lab in UAE Arabian Tool Calibration Point Tool center points are critical when updating programs. The conventional tool center point calibration (tcp). Calibration of a robot's tool center point using a laser displacement sensor abstract: The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. Contact with reference parts, the use. Tool Calibration Point.
From www.canadianmetalworking.com
A guide to gauge calibration Tool Calibration Point Contact with reference parts, the use of distance. The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. Tool center points are critical when updating programs. There are various methods for calibrating the tool center point (tcp). Calibration of a robot's tool center point. Tool Calibration Point.
From www.precisionmass.com
How to Calibrate a Pressure Transmitter? Precision Mass Tool Calibration Point The conventional tool center point calibration (tcp). Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user jogs the robot to several poses where the tool to be calibrated touches the same point from different orientations. Contact with reference parts, the use. Tool Calibration Point.
From www.thereliablestore.com
Datacolor Spydercube Raw Calibration Tool The Reliable Store Tool Calibration Point There are various methods for calibrating the tool center point (tcp). Tool center points are critical when updating programs. Contact with reference parts, the use of distance. Calibration of a robot's tool center point using a laser displacement sensor abstract: The conventional tool center point calibration (tcp). Provides a library and simple command line utility for doing 3 dof (x,. Tool Calibration Point.
From bodyshopnews.net
John Bean TruPoint ADAS Calibration System Approved For Hyundai, Kia Tool Calibration Point Contact with reference parts, the use of distance. The conventional tool center point calibration (tcp). Calibration of a robot's tool center point using a laser displacement sensor abstract: There are various methods for calibrating the tool center point (tcp). The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such. Tool Calibration Point.
From eu.flukecal.com
2 guidelines to make sure the pressure calibration equipment you're Tool Calibration Point There are various methods for calibrating the tool center point (tcp). Tool center points are critical when updating programs. Calibration of a robot's tool center point using a laser displacement sensor abstract: Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user. Tool Calibration Point.
From www.mdpi.com
Actuators Free FullText Automatic Calibration of Tool Center Point Tool Calibration Point There are various methods for calibrating the tool center point (tcp). The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. Tool center points are critical when updating programs. Calibration of a robot's tool center point using a laser displacement sensor abstract: Contact with. Tool Calibration Point.
From www.quality-assurance-solutions.com
Tool Calibration and Control System Tool Calibration Point Tool center points are critical when updating programs. The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. Contact with reference parts, the use of distance. The conventional tool center point calibration (tcp). There are various methods for calibrating the tool center point (tcp).. Tool Calibration Point.
From siglentna.com
calibrationcertificateSNA5000A Siglent Tool Calibration Point Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user jogs the robot to several poses where the tool to be calibrated touches the same point from different orientations. There are various methods for calibrating the tool center point (tcp). The robot. Tool Calibration Point.
From www.mdpi.com
Actuators Free FullText Automatic Calibration of Tool Center Point Tool Calibration Point The conventional tool center point calibration (tcp). Contact with reference parts, the use of distance. Calibration of a robot's tool center point using a laser displacement sensor abstract: There are various methods for calibrating the tool center point (tcp). Tool center points are critical when updating programs. The robot tool, or tool center point (tcp), is the point used to. Tool Calibration Point.
From www.maintwiz.com
The 12 Steps that Make up the Instrument Calibration Process Tool Calibration Point Calibration of a robot's tool center point using a laser displacement sensor abstract: The conventional tool center point calibration (tcp). The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. Provides a library and simple command line utility for doing 3 dof (x, y,. Tool Calibration Point.
From www.damencnc.com
TCP Calibration Tool, Long Point, Ø=30mm L=450mm DamenCNC B.V. Tool Calibration Point There are various methods for calibrating the tool center point (tcp). Tool center points are critical when updating programs. The conventional tool center point calibration (tcp). Contact with reference parts, the use of distance. Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein. Tool Calibration Point.
From www.wasyresearch.com
CMM Calibration, performance verification and measurement uncertainty Tool Calibration Point Tool center points are critical when updating programs. There are various methods for calibrating the tool center point (tcp). The conventional tool center point calibration (tcp). Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user jogs the robot to several poses. Tool Calibration Point.
From automationcommunity.com
Pressure Transmitter Calibration Procedure Tool Calibration Point Tool center points are critical when updating programs. Calibration of a robot's tool center point using a laser displacement sensor abstract: Contact with reference parts, the use of distance. The conventional tool center point calibration (tcp). There are various methods for calibrating the tool center point (tcp). Provides a library and simple command line utility for doing 3 dof (x,. Tool Calibration Point.
From mphy0026.readthedocs.io
5.3. Pivot calibration — MPHY0026 documentation Tool Calibration Point Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user jogs the robot to several poses where the tool to be calibrated touches the same point from different orientations. Tool center points are critical when updating programs. The robot tool, or tool. Tool Calibration Point.
From vru.vibrationresearch.com
Calibration Verification Checklist VRU Tool Calibration Point The conventional tool center point calibration (tcp). The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. Tool center points are critical when updating programs. There are various methods for calibrating the tool center point (tcp). Calibration of a robot's tool center point using. Tool Calibration Point.
From www.thereliablestore.com
Datacolor Spydercube Raw Calibration Tool The Reliable Store Tool Calibration Point The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. Contact with reference parts, the use of distance. Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein. Tool Calibration Point.
From www.windpowerengineering.com
May I see the Calibration Certificate for your Torque Wrench? Tool Calibration Point The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. Calibration of a robot's tool center point using a laser displacement sensor abstract: The conventional tool center point calibration (tcp). Provides a library and simple command line utility for doing 3 dof (x, y,. Tool Calibration Point.
From amlinstruments.co.uk
Dimensional Calibration Services Pressure Gauge Calibration AML Tool Calibration Point The conventional tool center point calibration (tcp). Contact with reference parts, the use of distance. Calibration of a robot's tool center point using a laser displacement sensor abstract: Tool center points are critical when updating programs. The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian. Tool Calibration Point.
From www.glue-it.com
How to Calibrate Your CNC Machine Tool Calibration Point Tool center points are critical when updating programs. Calibration of a robot's tool center point using a laser displacement sensor abstract: There are various methods for calibrating the tool center point (tcp). The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. Provides a. Tool Calibration Point.
From www.arabcal.com
ITS90 Optimal Fixed Point Cells Calibration Lab in UAE Arabian Tool Calibration Point Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user jogs the robot to several poses where the tool to be calibrated touches the same point from different orientations. There are various methods for calibrating the tool center point (tcp). The conventional. Tool Calibration Point.
From ciqa.net
What is a Calibration Certificate or Calibration Record as per ISO17025? Tool Calibration Point Contact with reference parts, the use of distance. Calibration of a robot's tool center point using a laser displacement sensor abstract: The conventional tool center point calibration (tcp). Tool center points are critical when updating programs. The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian. Tool Calibration Point.
From www.arabcal.com
Gallium Fixed Point Apparatus Calibration Lab in UAE Arabian Tool Calibration Point Calibration of a robot's tool center point using a laser displacement sensor abstract: Contact with reference parts, the use of distance. The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. There are various methods for calibrating the tool center point (tcp). Provides a. Tool Calibration Point.
From terpconnect.umd.edu
Worksheet for analytical calibration curve Tool Calibration Point The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. The conventional tool center point calibration (tcp). Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the. Tool Calibration Point.
From www.damencnc.com
Robot TCP Calibration Set, HSK63F, (Base Point, Short Point, LongPoint Tool Calibration Point Calibration of a robot's tool center point using a laser displacement sensor abstract: There are various methods for calibrating the tool center point (tcp). Contact with reference parts, the use of distance. The conventional tool center point calibration (tcp). Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through. Tool Calibration Point.
From www.autosuccessonline.com
John Bean TruPoint ADAS Calibration Tool Approved for Hyundai, Kia and Tool Calibration Point Calibration of a robot's tool center point using a laser displacement sensor abstract: Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user jogs the robot to several poses where the tool to be calibrated touches the same point from different orientations.. Tool Calibration Point.
From automationforum.co
8 Steps Calibration Procedure for Thermocouple Tool Calibration Point There are various methods for calibrating the tool center point (tcp). Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user jogs the robot to several poses where the tool to be calibrated touches the same point from different orientations. Tool center. Tool Calibration Point.
From www.youtube.com
How to calibrate Tool Center Point on the CoWelder YouTube Tool Calibration Point Contact with reference parts, the use of distance. Calibration of a robot's tool center point using a laser displacement sensor abstract: There are various methods for calibrating the tool center point (tcp). Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user. Tool Calibration Point.
From www.inpaspages.com
Calibration Standard Record Tool Calibration Point There are various methods for calibrating the tool center point (tcp). The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. Calibration of a robot's tool center point using a laser displacement sensor abstract: The conventional tool center point calibration (tcp). Contact with reference. Tool Calibration Point.
From automationforum.co
What are Five Point calibration & its basics? Tool Calibration Point There are various methods for calibrating the tool center point (tcp). Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user jogs the robot to several poses where the tool to be calibrated touches the same point from different orientations. The robot. Tool Calibration Point.
From www.thereliablestore.com
Datacolor Spydercube Raw Calibration Tool The Reliable Store Tool Calibration Point The conventional tool center point calibration (tcp). The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. Calibration of a robot's tool center point using a laser displacement sensor abstract: Contact with reference parts, the use of distance. Tool center points are critical when. Tool Calibration Point.
From www.chefstemp.com
How to calibrate a thermometer in boiling water ChefsTemp Tool Calibration Point There are various methods for calibrating the tool center point (tcp). The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. The conventional tool center point calibration (tcp). Calibration of a robot's tool center point using a laser displacement sensor abstract: Contact with reference. Tool Calibration Point.
From instrumentationtools.com
How to Create Calibration Records? Instrumentation and Control Tool Calibration Point Calibration of a robot's tool center point using a laser displacement sensor abstract: Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user jogs the robot to several poses where the tool to be calibrated touches the same point from different orientations.. Tool Calibration Point.
From instrulearning.com
How to do a pressure calibration Instrulearning Tool Calibration Point Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's tool through the touch point method wherein the user jogs the robot to several poses where the tool to be calibrated touches the same point from different orientations. The robot tool, or tool center point (tcp), is the point used to. Tool Calibration Point.
From www.norbar.com
Calibration Certificates Tool Calibration Point The conventional tool center point calibration (tcp). The robot tool, or tool center point (tcp), is the point used to move the robot to a cartesian position (such as a cartesian target given. Tool center points are critical when updating programs. Provides a library and simple command line utility for doing 3 dof (x, y, z) calibration of a robot's. Tool Calibration Point.