Camera Calibration Using Checkerboard . The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. In this blog, i am going. A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. You can find a chessboard pattern in. Consider an image of a chess board. The goal of this tutorial is to learn how to create calibration pattern. Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and the camera. First define real world coordinates of 3d points using known size of. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual.
from www.semanticscholar.org
Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and the camera. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. Consider an image of a chess board. You can find a chessboard pattern in. A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. First define real world coordinates of 3d points using known size of. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. The goal of this tutorial is to learn how to create calibration pattern. In this blog, i am going.
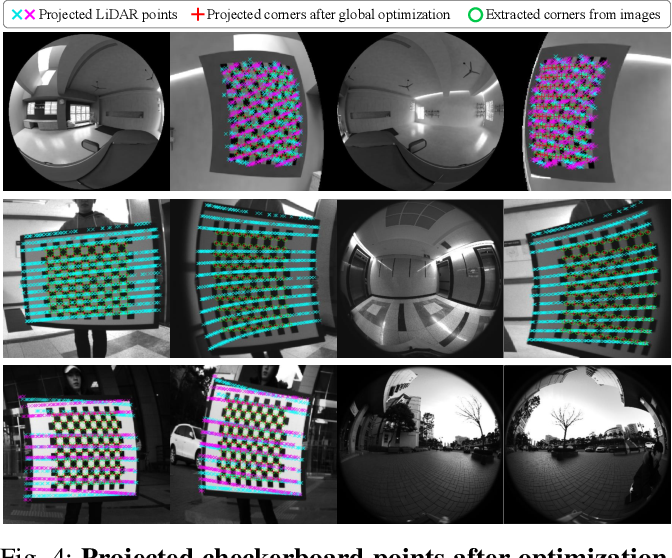
Figure 4 from Unified Calibration for Multicamera MultiLiDAR Systems
Camera Calibration Using Checkerboard Consider an image of a chess board. Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and the camera. The goal of this tutorial is to learn how to create calibration pattern. You can find a chessboard pattern in. A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. Consider an image of a chess board. First define real world coordinates of 3d points using known size of. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. In this blog, i am going.
From www.semanticscholar.org
Figure 8 from Fully Automatic Camera Calibration Using SelfIdentifying Camera Calibration Using Checkerboard A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. In this blog, i am going. Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and. Camera Calibration Using Checkerboard.
From github.com
GitHub BarbatosV2/CameraCalibration Camera Calibration using Camera Calibration Using Checkerboard For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. You can find a chessboard pattern in. First define real world coordinates of 3d points using known size of. Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object. Camera Calibration Using Checkerboard.
From www.researchgate.net
Structural diagram of a calibration system. Camera 1 and Checkerboard 1 Camera Calibration Using Checkerboard Consider an image of a chess board. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. In this blog, i am going. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. First define real world. Camera Calibration Using Checkerboard.
From www.researchgate.net
Image calibration using a checkerboard. Download Scientific Diagram Camera Calibration Using Checkerboard Consider an image of a chess board. A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. First define real world coordinates of 3d points using known size of. You can find a chessboard pattern in. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. Camera calibration. Camera Calibration Using Checkerboard.
From www.vrogue.co
Checkerboard Tracker For Camera Calibration vrogue.co Camera Calibration Using Checkerboard A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. Consider an image of a chess board. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding. Camera Calibration Using Checkerboard.
From support.cognex.com
Checkerboard Calibration Camera Calibration Using Checkerboard The goal of this tutorial is to learn how to create calibration pattern. A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. You can find a chessboard pattern in. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. Camera calibration is the most. Camera Calibration Using Checkerboard.
From www.semanticscholar.org
Figure 1 from Calibration of a Different Fieldofview Stereo Camera Camera Calibration Using Checkerboard First define real world coordinates of 3d points using known size of. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. The goal of this tutorial. Camera Calibration Using Checkerboard.
From www.youtube.com
Camera Calibration Checkerboard ㅣI Like To Print Stuff YouTube Camera Calibration Using Checkerboard In this blog, i am going. First define real world coordinates of 3d points using known size of. You can find a chessboard pattern in. The goal of this tutorial is to learn how to create calibration pattern. Consider an image of a chess board. The important input data needed for calibration of the camera is the set of 3d. Camera Calibration Using Checkerboard.
From www.youtube.com
camera calibration using checkerboard part two computer vision شرح Camera Calibration Using Checkerboard The goal of this tutorial is to learn how to create calibration pattern. Consider an image of a chess board. Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and the camera. In this blog, i am going. You can find a chessboard pattern in. First define real. Camera Calibration Using Checkerboard.
From calib.io
Camera Calibration Checkerboard Target / Plate by Calib.io calib.io Camera Calibration Using Checkerboard Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and the camera. A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. You can find a chessboard pattern in. The goal of this tutorial is to learn how to create calibration pattern. The important input data. Camera Calibration Using Checkerboard.
From www.pdfprof.com
camera calibration with checkerboard Camera Calibration Using Checkerboard The goal of this tutorial is to learn how to create calibration pattern. A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. You can find a chessboard pattern in. Consider an image of a. Camera Calibration Using Checkerboard.
From www.vrogue.co
Camera Calibration Process Checkerboard Images With D vrogue.co Camera Calibration Using Checkerboard Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and the camera. Consider an image of a chess board. A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. For many applications, it is essential to know the parameters of a camera to use it effectively. Camera Calibration Using Checkerboard.
From www.mdpi.com
Sensors Free FullText Infrared Camera Geometric Calibration A Camera Calibration Using Checkerboard A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. You can find a chessboard pattern in. Consider an image of a chess board. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. Camera calibration is the most important part when one wants to. Camera Calibration Using Checkerboard.
From jsss.copernicus.org
JSSS Iterative feature detection of a coded checkerboard target for Camera Calibration Using Checkerboard For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. The goal of this tutorial is to learn how to create calibration pattern. Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and the camera. Consider an image. Camera Calibration Using Checkerboard.
From www.pdfprof.com
camera calibration with checkerboard Camera Calibration Using Checkerboard Consider an image of a chess board. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. First define real world coordinates of 3d points using known size of. A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. You can find a chessboard pattern in. In this. Camera Calibration Using Checkerboard.
From www.semanticscholar.org
Figure 4 from Unified Calibration for Multicamera MultiLiDAR Systems Camera Calibration Using Checkerboard A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and the camera. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. Consider. Camera Calibration Using Checkerboard.
From github.com
GitHub basilisklizard/cameracalibrationcheckerboard Camera Camera Calibration Using Checkerboard A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. You can find a chessboard pattern in. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. Camera calibration is the most important part when one wants to detect or calculate the distance between the. Camera Calibration Using Checkerboard.
From www.youtube.com
Camera Calibration with checkerboard YouTube Camera Calibration Using Checkerboard The goal of this tutorial is to learn how to create calibration pattern. First define real world coordinates of 3d points using known size of. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. You can find a chessboard pattern in. In this blog, i am going. A chessboard). Camera Calibration Using Checkerboard.
From www.vrogue.co
Checkerboard Tracker For Camera Calibration vrogue.co Camera Calibration Using Checkerboard In this blog, i am going. Consider an image of a chess board. Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and the camera. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates.. Camera Calibration Using Checkerboard.
From slideplayer.com
Calibration Overview Jason Rebello 10/07/ ppt download Camera Calibration Using Checkerboard A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. In this blog, i am going. First define real world coordinates of 3d points using known size of. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. You can find a chessboard pattern in.. Camera Calibration Using Checkerboard.
From www.researchgate.net
The modes of camera calibration. (a) Two side boards without Camera Calibration Using Checkerboard You can find a chessboard pattern in. In this blog, i am going. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. Consider an image of a chess board. Camera calibration is the most. Camera Calibration Using Checkerboard.
From calib.io
Camera Calibration Checkerboard Target / Plate by Calib.io calib.io Camera Calibration Using Checkerboard Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and the camera. The goal of this tutorial is to learn how to create calibration pattern. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates.. Camera Calibration Using Checkerboard.
From www.pinterest.com
Camera Calibration using OpenCV LearnOpenCV Deep learning, Types Camera Calibration Using Checkerboard The goal of this tutorial is to learn how to create calibration pattern. Consider an image of a chess board. First define real world coordinates of 3d points using known size of. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. You can find a chessboard pattern in. A. Camera Calibration Using Checkerboard.
From www.vrogue.co
Checkerboard Tracker For Camera Calibration vrogue.co Camera Calibration Using Checkerboard In this blog, i am going. First define real world coordinates of 3d points using known size of. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. Consider an image of a chess board. You can find a chessboard pattern in. Camera calibration is the most important part when. Camera Calibration Using Checkerboard.
From github.com
GitHub KrishnaH96/CameraCalibrationusingcheckerboardimages Camera Calibration Using Checkerboard A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. First define real world coordinates of 3d points using known size of. Consider an image of a chess board. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. In this blog, i am going. Camera calibration is. Camera Calibration Using Checkerboard.
From docs.unrealengine.com
Camera Lens Calibration for Production Unreal Engine Documentation Camera Calibration Using Checkerboard In this blog, i am going. Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and the camera. A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. The important input data needed for calibration of the camera is the set of 3d real world points. Camera Calibration Using Checkerboard.
From www.mdpi.com
Sensors Free FullText Infrared Camera Geometric Calibration A Camera Calibration Using Checkerboard The goal of this tutorial is to learn how to create calibration pattern. Consider an image of a chess board. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any. Camera Calibration Using Checkerboard.
From github.com
GitHub TaarunSrinivas/CameraCalibrationusingCheckerboard Camera Calibration Using Checkerboard The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and the camera. You can find a chessboard pattern in. A chessboard) to estimate the extrinsic. Camera Calibration Using Checkerboard.
From www.vrogue.co
Camera Calibration Process Checkerboard Images With D vrogue.co Camera Calibration Using Checkerboard You can find a chessboard pattern in. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. Consider an image of a chess board. Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and the camera. A chessboard). Camera Calibration Using Checkerboard.
From www.researchgate.net
Checker board for semiautomatic camera calibration using the MATLAB Camera Calibration Using Checkerboard The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. You can find a chessboard pattern in. Camera calibration is the most important part when one wants to detect or calculate the distance between the. Camera Calibration Using Checkerboard.
From www.youtube.com
Camera calibration using checkerboard YouTube Camera Calibration Using Checkerboard Consider an image of a chess board. In this blog, i am going. Camera calibration is the most important part when one wants to detect or calculate the distance between the ar marker/any object and the camera. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates.. Camera Calibration Using Checkerboard.
From www.vrogue.co
Checkerboard Tracker For Camera Calibration vrogue.co Camera Calibration Using Checkerboard You can find a chessboard pattern in. For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. First define real world coordinates of 3d points using known size of. In this blog, i am going. Camera calibration is the most important part when one wants to detect or calculate the. Camera Calibration Using Checkerboard.
From www.researchgate.net
Planar checkerboard used for camera calibration. Each square is 2.9 Camera Calibration Using Checkerboard A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. You can find a chessboard pattern in. Consider an image of a chess board. The goal of this tutorial is to learn how to create calibration pattern. First define real world coordinates of 3d points using known size of. In this blog, i am going. The important input. Camera Calibration Using Checkerboard.
From www.cvlibs.net
Andreas Geiger Camera Calibration Using Checkerboard A chessboard) to estimate the extrinsic parameters (rotation and translation vectors) and. The important input data needed for calibration of the camera is the set of 3d real world points and the corresponding 2d coordinates. The goal of this tutorial is to learn how to create calibration pattern. You can find a chessboard pattern in. Consider an image of a. Camera Calibration Using Checkerboard.
From www.mdpi.com
Sensors Free FullText Infrared Camera Geometric Calibration A Camera Calibration Using Checkerboard For many applications, it is essential to know the parameters of a camera to use it effectively as a visual. The goal of this tutorial is to learn how to create calibration pattern. First define real world coordinates of 3d points using known size of. Consider an image of a chess board. A chessboard) to estimate the extrinsic parameters (rotation. Camera Calibration Using Checkerboard.