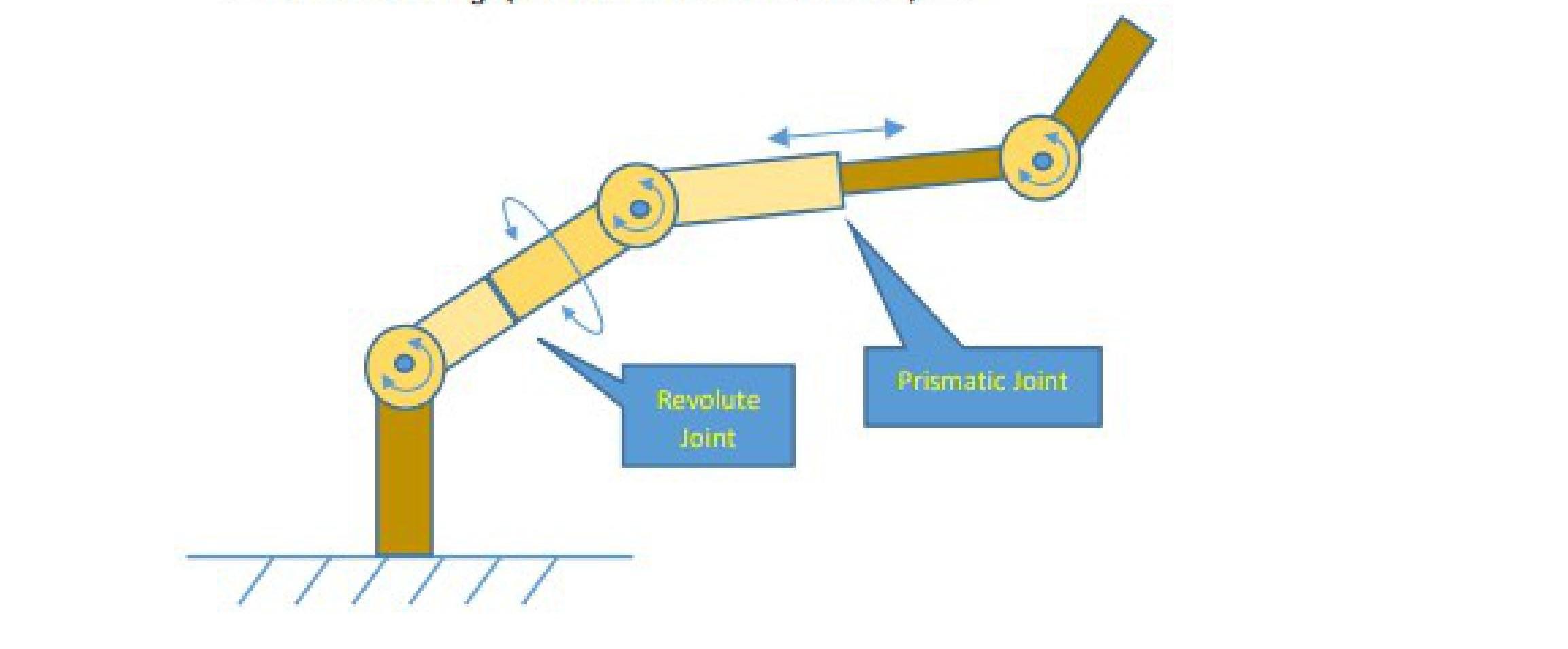
Prismatic Revolute Joint . In robotics, a revolute joint, also referred to as a hinge joint, is a type of joint that allows rotational movement between two connected parts. The joint moves along the input link axis. In the case of a revolute joint, q i is the angle of rotation; The output link translate respect to inputlink. These actuators are movable parts and cause relative motion between the two links it connects. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. In this paper we combine a survey of the most important topological properties of kinematic maps that appear in robotics, with the exposition. Along with its link lengths and joint axes, this defines its kinematic structure. There are two types of prismatic joints. Revolute (r), prismatic (p) and helical (h) joints. In the case of a prismatic joint, q i is the joint displacement. The topology of a robot structure is defined by its joint types (e.g., revolute, prismatic, and spherical) and how they are connected. In other words, one link slides on the other. It enables the rotational movement of a robotic arm. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint.
from www.chegg.com
Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. In the case of a revolute joint, q i is the angle of rotation; In robotics, a revolute joint, also referred to as a hinge joint, is a type of joint that allows rotational movement between two connected parts. Along with its link lengths and joint axes, this defines its kinematic structure. These actuators are movable parts and cause relative motion between the two links it connects. The joint moves along the input link axis. It enables the rotational movement of a robotic arm. Revolute (r), prismatic (p) and helical (h) joints. The output link translate respect to inputlink. In other words, one link slides on the other.
Solved L Prismatic Joint Revolute Joint In your
Prismatic Revolute Joint The output link translate respect to inputlink. In other words, one link slides on the other. There are two types of prismatic joints. Along with its link lengths and joint axes, this defines its kinematic structure. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. In this paper we combine a survey of the most important topological properties of kinematic maps that appear in robotics, with the exposition. In the case of a revolute joint, q i is the angle of rotation; In robotics, a revolute joint, also referred to as a hinge joint, is a type of joint that allows rotational movement between two connected parts. The topology of a robot structure is defined by its joint types (e.g., revolute, prismatic, and spherical) and how they are connected. Revolute (r), prismatic (p) and helical (h) joints. The output link translate respect to inputlink. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. The joint moves along the input link axis. These actuators are movable parts and cause relative motion between the two links it connects. In the case of a prismatic joint, q i is the joint displacement. It enables the rotational movement of a robotic arm.
From www.numerade.com
2 shown below is a construction robot having two revolute joints and Prismatic Revolute Joint It enables the rotational movement of a robotic arm. Revolute (r), prismatic (p) and helical (h) joints. In other words, one link slides on the other. These actuators are movable parts and cause relative motion between the two links it connects. In the case of a revolute joint, q i is the angle of rotation; In robotics, a revolute joint,. Prismatic Revolute Joint.
From www.chegg.com
2. The following figure illustrates a P2R manipulator Prismatic Revolute Joint Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. In the case of a prismatic joint, q i is the joint displacement. In other words, one link slides on the other. There are two types of prismatic joints. The joint moves along the input link axis. In the case of a. Prismatic Revolute Joint.
From www.youtube.com
Understand prismatic joint and how it affects the degrees of freedom in Prismatic Revolute Joint In robotics, a revolute joint, also referred to as a hinge joint, is a type of joint that allows rotational movement between two connected parts. The joint moves along the input link axis. In this paper we combine a survey of the most important topological properties of kinematic maps that appear in robotics, with the exposition. It enables the rotational. Prismatic Revolute Joint.
From www.researchgate.net
DH frame assignment for the 6REXOS. P Prismatic joint, R Revolute Prismatic Revolute Joint Along with its link lengths and joint axes, this defines its kinematic structure. The joint moves along the input link axis. In other words, one link slides on the other. In the case of a revolute joint, q i is the angle of rotation; There are two types of prismatic joints. Revolute (r), prismatic (p) and helical (h) joints. The. Prismatic Revolute Joint.
From www.researchgate.net
3RUPR nonoverconstrained UTPM. RUPR revolute, universal, prismatic Prismatic Revolute Joint In other words, one link slides on the other. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. Revolute (r), prismatic (p) and helical (h) joints. In the case of a prismatic joint, q i is the joint displacement. There are two types of prismatic joints. In robotics, a revolute. Prismatic Revolute Joint.
From www.researchgate.net
2 Symbols of joints (arrows show direction of motion). (a) Prismatic Prismatic Revolute Joint Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. In robotics, a revolute joint, also referred to as a hinge joint, is a type of joint that allows rotational movement between two connected parts. In the case of a revolute joint, q i is the angle of rotation; Along with its. Prismatic Revolute Joint.
From www.researchgate.net
1 Manipulator with Revolute and Prismatic Joints [1] Download Prismatic Revolute Joint Along with its link lengths and joint axes, this defines its kinematic structure. In the case of a revolute joint, q i is the angle of rotation; Revolute (r), prismatic (p) and helical (h) joints. In robotics, a revolute joint, also referred to as a hinge joint, is a type of joint that allows rotational movement between two connected parts.. Prismatic Revolute Joint.
From www.chegg.com
Solved (a) What is the difference between a prismatic joint Prismatic Revolute Joint The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. The output link translate respect to inputlink. Revolute (r), prismatic (p) and helical (h) joints. It enables the rotational movement of a robotic. Prismatic Revolute Joint.
From www.pngwing.com
Prismatic joint Degrees of freedom Revolute joint Mechanics, joint Prismatic Revolute Joint The joint moves along the input link axis. There are two types of prismatic joints. In other words, one link slides on the other. In the case of a revolute joint, q i is the angle of rotation; These actuators are movable parts and cause relative motion between the two links it connects. In this paper we combine a survey. Prismatic Revolute Joint.
From www.researchgate.net
Symbol of revolute (rotary) and prismatic joints. Download Scientific Prismatic Revolute Joint It enables the rotational movement of a robotic arm. In robotics, a revolute joint, also referred to as a hinge joint, is a type of joint that allows rotational movement between two connected parts. In the case of a prismatic joint, q i is the joint displacement. The output link translate respect to inputlink. The topology of a robot structure. Prismatic Revolute Joint.
From www.numerade.com
SOLVED Write the Jacobian matrix for the robotic arm Make use of Prismatic Revolute Joint The output link translate respect to inputlink. The topology of a robot structure is defined by its joint types (e.g., revolute, prismatic, and spherical) and how they are connected. The joint moves along the input link axis. These actuators are movable parts and cause relative motion between the two links it connects. In the case of a prismatic joint, q. Prismatic Revolute Joint.
From www.chegg.com
Solved it is Prismatic Revolute joint. only 2 joint find Prismatic Revolute Joint The topology of a robot structure is defined by its joint types (e.g., revolute, prismatic, and spherical) and how they are connected. In other words, one link slides on the other. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. In the case of a prismatic joint, q i is. Prismatic Revolute Joint.
From www.chegg.com
Solved L Prismatic Joint Revolute Joint In your Prismatic Revolute Joint Revolute (r), prismatic (p) and helical (h) joints. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. The output link translate respect to inputlink. In the case of a revolute joint, q i is the angle of rotation; It enables the rotational movement of a robotic arm. These actuators are movable. Prismatic Revolute Joint.
From medium.com
Degrees of freedom of a Robot. Until now , we covered the… by khalil Prismatic Revolute Joint In robotics, a revolute joint, also referred to as a hinge joint, is a type of joint that allows rotational movement between two connected parts. These actuators are movable parts and cause relative motion between the two links it connects. In the case of a prismatic joint, q i is the joint displacement. In this paper we combine a survey. Prismatic Revolute Joint.
From www.researchgate.net
A 3DoFs manipulator which has two revolute joints and one prismatic Prismatic Revolute Joint The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. It enables the rotational movement of a robotic arm. In robotics, a revolute joint, also referred to as a hinge joint, is a type of joint that allows rotational movement between two connected parts. Each joint, like the elbow, can be. Prismatic Revolute Joint.
From www.chegg.com
Solved The robot shown in Figure 2 has two revolute joints Prismatic Revolute Joint The topology of a robot structure is defined by its joint types (e.g., revolute, prismatic, and spherical) and how they are connected. The output link translate respect to inputlink. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. Each joint, like the elbow, can be classified as a revolute (r). Prismatic Revolute Joint.
From www.researchgate.net
The three revolute joints connected to the moving platform are Prismatic Revolute Joint In the case of a revolute joint, q i is the angle of rotation; In this paper we combine a survey of the most important topological properties of kinematic maps that appear in robotics, with the exposition. It enables the rotational movement of a robotic arm. There are two types of prismatic joints. The first is a prismatic joint where. Prismatic Revolute Joint.
From www.researchgate.net
The twoDOF robot manipulator with revolute and prismatic joints used Prismatic Revolute Joint Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. Along with its link lengths and joint axes, this defines its kinematic structure. These actuators are movable parts and cause relative motion between the two links it connects. The first is a prismatic joint where the pair of links makes a translational. Prismatic Revolute Joint.
From www.researchgate.net
An example of a simple manipulator from [43]. There are 4 joints, 3 of Prismatic Revolute Joint It enables the rotational movement of a robotic arm. Revolute (r), prismatic (p) and helical (h) joints. The output link translate respect to inputlink. In other words, one link slides on the other. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. Along with its link lengths and joint axes, this. Prismatic Revolute Joint.
From www.youtube.com
Understand revolute joint and how it affects the degrees of freedom in Prismatic Revolute Joint In this paper we combine a survey of the most important topological properties of kinematic maps that appear in robotics, with the exposition. In the case of a revolute joint, q i is the angle of rotation; There are two types of prismatic joints. The output link translate respect to inputlink. Along with its link lengths and joint axes, this. Prismatic Revolute Joint.
From www.chegg.com
Solved 2. Shown below is a construction robot having two Prismatic Revolute Joint The output link translate respect to inputlink. Revolute (r), prismatic (p) and helical (h) joints. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. In other words, one link slides on the other. In robotics, a revolute joint, also referred to as a hinge joint, is a type of joint. Prismatic Revolute Joint.
From www.semanticscholar.org
Figure 1 from Design Optimization of a PrismaticRevoluteRevolute Prismatic Revolute Joint These actuators are movable parts and cause relative motion between the two links it connects. There are two types of prismatic joints. In robotics, a revolute joint, also referred to as a hinge joint, is a type of joint that allows rotational movement between two connected parts. Each joint, like the elbow, can be classified as a revolute (r) joint. Prismatic Revolute Joint.
From www.youtube.com
Catia V5 DMU Kinematics Revolute Prismatic Joint YouTube Prismatic Revolute Joint The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. In the case of a revolute joint, q i is the angle of rotation; In the case of a prismatic joint, q i is the joint displacement. In this paper we combine a survey of the most important topological properties of. Prismatic Revolute Joint.
From altair.com
Thought Leader Thursday The Evolution of CAE Modeling From Solver Prismatic Revolute Joint The joint moves along the input link axis. The topology of a robot structure is defined by its joint types (e.g., revolute, prismatic, and spherical) and how they are connected. There are two types of prismatic joints. In the case of a prismatic joint, q i is the joint displacement. In the case of a revolute joint, q i is. Prismatic Revolute Joint.
From www.researchgate.net
Kinematic model and design variables of prismaticrevoluterevolute Prismatic Revolute Joint The joint moves along the input link axis. In other words, one link slides on the other. In robotics, a revolute joint, also referred to as a hinge joint, is a type of joint that allows rotational movement between two connected parts. It enables the rotational movement of a robotic arm. There are two types of prismatic joints. Along with. Prismatic Revolute Joint.
From www.researchgate.net
The consecutive prismatic joints and consecutive parallel revolute Prismatic Revolute Joint In the case of a revolute joint, q i is the angle of rotation; It enables the rotational movement of a robotic arm. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. Revolute (r), prismatic (p) and helical (h) joints. These actuators are movable parts and cause relative motion between. Prismatic Revolute Joint.
From www.numerade.com
Figure 2 Construction robot with two revolute joints and one prismatic Prismatic Revolute Joint Along with its link lengths and joint axes, this defines its kinematic structure. There are two types of prismatic joints. In this paper we combine a survey of the most important topological properties of kinematic maps that appear in robotics, with the exposition. In the case of a prismatic joint, q i is the joint displacement. The topology of a. Prismatic Revolute Joint.
From www.slideserve.com
PPT Sa ME 192 Lecture 8/27/14 San Jose State University Overview Prismatic Revolute Joint There are two types of prismatic joints. Along with its link lengths and joint axes, this defines its kinematic structure. Revolute (r), prismatic (p) and helical (h) joints. In this paper we combine a survey of the most important topological properties of kinematic maps that appear in robotics, with the exposition. In other words, one link slides on the other.. Prismatic Revolute Joint.
From www.researchgate.net
Double linear spring prismatic joint. Download Scientific Diagram Prismatic Revolute Joint Along with its link lengths and joint axes, this defines its kinematic structure. In robotics, a revolute joint, also referred to as a hinge joint, is a type of joint that allows rotational movement between two connected parts. In the case of a revolute joint, q i is the angle of rotation; Each joint, like the elbow, can be classified. Prismatic Revolute Joint.
From www.researchgate.net
Full and half joints As shown in Figure 1, revolute pairs or prismatic Prismatic Revolute Joint In the case of a revolute joint, q i is the angle of rotation; The joint moves along the input link axis. In the case of a prismatic joint, q i is the joint displacement. In this paper we combine a survey of the most important topological properties of kinematic maps that appear in robotics, with the exposition. These actuators. Prismatic Revolute Joint.
From www.numerade.com
SOLVED Shown below is a construction robot having two revolute joints Prismatic Revolute Joint Along with its link lengths and joint axes, this defines its kinematic structure. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. The topology of a robot structure is defined by its joint types (e.g., revolute, prismatic, and spherical) and how they are connected. In robotics, a revolute joint, also referred. Prismatic Revolute Joint.
From www.youtube.com
Mechanism Lecture7 Revolute Joint YouTube Prismatic Revolute Joint Revolute (r), prismatic (p) and helical (h) joints. In this paper we combine a survey of the most important topological properties of kinematic maps that appear in robotics, with the exposition. The topology of a robot structure is defined by its joint types (e.g., revolute, prismatic, and spherical) and how they are connected. It enables the rotational movement of a. Prismatic Revolute Joint.
From favpng.com
Revolute Joint Degrees Of Freedom Prismatic Joint Kinematic Pair, PNG Prismatic Revolute Joint Along with its link lengths and joint axes, this defines its kinematic structure. The topology of a robot structure is defined by its joint types (e.g., revolute, prismatic, and spherical) and how they are connected. In the case of a prismatic joint, q i is the joint displacement. In the case of a revolute joint, q i is the angle. Prismatic Revolute Joint.
From www.chegg.com
Solved The robot shown in Figure 1 has a single revolute Prismatic Revolute Joint Revolute (r), prismatic (p) and helical (h) joints. In the case of a prismatic joint, q i is the joint displacement. The output link translate respect to inputlink. Along with its link lengths and joint axes, this defines its kinematic structure. It enables the rotational movement of a robotic arm. The joint moves along the input link axis. In this. Prismatic Revolute Joint.
From slideplayer.com
Computer Animation Algorithms and Techniques ppt download Prismatic Revolute Joint Along with its link lengths and joint axes, this defines its kinematic structure. The joint moves along the input link axis. The topology of a robot structure is defined by its joint types (e.g., revolute, prismatic, and spherical) and how they are connected. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p). Prismatic Revolute Joint.