Gyro Drift Rate . Measure of the instantaneous drift rate of the gyro and is due entirely to the fixed (r), unbalance (u., u«), and compliance (k) drift rates of the gyro. Ideally a gyro would measure only rotational rate, and nothing else. This integration will drift over time due to sensor noise. For example, bias can be due to the torque from the. The gyroscope drift is mainly due to the integration of two components: The rate gyroscope output is disturbed by two main groups of errors. For mechanical gyros, bias is sometimes called the acceleration insensitive drift rate. In practice, all gyros have some sensitivity to acceleration due to asymmetry of. This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique.
from www.semanticscholar.org
Ideally a gyro would measure only rotational rate, and nothing else. For example, bias can be due to the torque from the. Measure of the instantaneous drift rate of the gyro and is due entirely to the fixed (r), unbalance (u., u«), and compliance (k) drift rates of the gyro. The gyroscope drift is mainly due to the integration of two components: This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. The rate gyroscope output is disturbed by two main groups of errors. For mechanical gyros, bias is sometimes called the acceleration insensitive drift rate. In practice, all gyros have some sensitivity to acceleration due to asymmetry of. This integration will drift over time due to sensor noise.
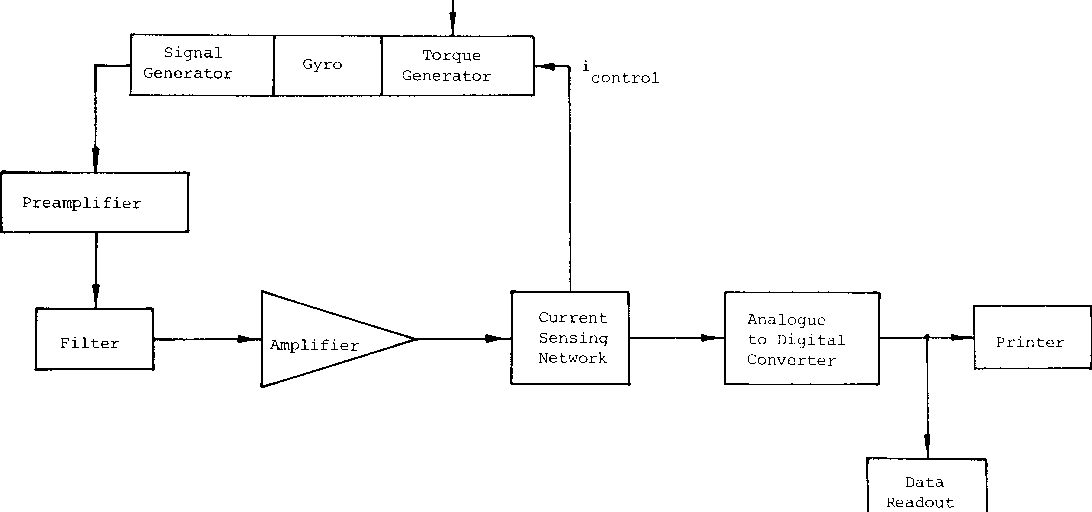
Figure 1 from Modeling Random Gyro Drift Rate by Data Dependent Systems
Gyro Drift Rate Ideally a gyro would measure only rotational rate, and nothing else. The rate gyroscope output is disturbed by two main groups of errors. Measure of the instantaneous drift rate of the gyro and is due entirely to the fixed (r), unbalance (u., u«), and compliance (k) drift rates of the gyro. For mechanical gyros, bias is sometimes called the acceleration insensitive drift rate. Ideally a gyro would measure only rotational rate, and nothing else. This integration will drift over time due to sensor noise. The gyroscope drift is mainly due to the integration of two components: In practice, all gyros have some sensitivity to acceleration due to asymmetry of. For example, bias can be due to the torque from the. This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique.
From www.carousell.sg
AFRC GYS1 V3 Racing Gyro Drift Car Stabiliser CNC Metal Case, Hobbies Gyro Drift Rate Ideally a gyro would measure only rotational rate, and nothing else. The rate gyroscope output is disturbed by two main groups of errors. This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). For example, bias can be due to the torque from the. This integration will. Gyro Drift Rate.
From avictech.en.made-in-china.com
Servo Stabilization System Fiber Gyro Low Drift Angular Rate Optic Gyro Gyro Drift Rate For mechanical gyros, bias is sometimes called the acceleration insensitive drift rate. A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. Ideally a gyro would measure only rotational rate, and nothing else. This integration will drift over time due to sensor noise. In practice, all gyros. Gyro Drift Rate.
From slideplayer.com
Using the Gyro Sensor and Dealing with Drift ppt download Gyro Drift Rate For mechanical gyros, bias is sometimes called the acceleration insensitive drift rate. This integration will drift over time due to sensor noise. This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). In practice, all gyros have some sensitivity to acceleration due to asymmetry of. The rate. Gyro Drift Rate.
From www.researchgate.net
Sequential Estimator xaxis Gyro Drift Rate Uncertainty Download Gyro Drift Rate This integration will drift over time due to sensor noise. In practice, all gyros have some sensitivity to acceleration due to asymmetry of. The gyroscope drift is mainly due to the integration of two components: Ideally a gyro would measure only rotational rate, and nothing else. A technique is implemented to fuse the two measurements into a single estimate of. Gyro Drift Rate.
From szmlwndz.en.made-in-china.com
Servo Stabilization System Fiber Gyro Low Drift Angular Rate Optic Gyro Gyro Drift Rate This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). The gyroscope drift is mainly due to the integration of two components: Measure of the instantaneous drift rate of the gyro and is due entirely to the fixed (r), unbalance (u., u«), and compliance (k) drift rates. Gyro Drift Rate.
From www.ebay.com.au
GYS2 V4 3AXIS Racing Gyro Drift Car Stabilizer EPA AVCS for Z D Q 1/ Gyro Drift Rate This integration will drift over time due to sensor noise. The gyroscope drift is mainly due to the integration of two components: A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. This drift appears as the integrated gyro angle taking random steps from sample to sample,. Gyro Drift Rate.
From www.auselectronicsdirect.com.au
UDI1601 116 RC 4WD Gyro Drift Car Dual Mode w/ LED Lights Gyro Drift Rate For example, bias can be due to the torque from the. Ideally a gyro would measure only rotational rate, and nothing else. Measure of the instantaneous drift rate of the gyro and is due entirely to the fixed (r), unbalance (u., u«), and compliance (k) drift rates of the gyro. The rate gyroscope output is disturbed by two main groups. Gyro Drift Rate.
From www.youtube.com
Properties of a Gyroscope Gyroscopic Inertia and Precession YouTube Gyro Drift Rate This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). The rate gyroscope output is disturbed by two main groups of errors. In practice, all gyros have some sensitivity to acceleration due to asymmetry of. This integration will drift over time due to sensor noise. Ideally a. Gyro Drift Rate.
From www.agf-rc.com
AGFRC Dual Gain Drift Tuned Rated RC Car Gyros for Drift Car Gyro Drift Rate Measure of the instantaneous drift rate of the gyro and is due entirely to the fixed (r), unbalance (u., u«), and compliance (k) drift rates of the gyro. This integration will drift over time due to sensor noise. A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a. Gyro Drift Rate.
From sptab.com
Borehole survey tool North Seeking gyro vs Drift rate gyro SPT Gyro Drift Rate For mechanical gyros, bias is sometimes called the acceleration insensitive drift rate. In practice, all gyros have some sensitivity to acceleration due to asymmetry of. Ideally a gyro would measure only rotational rate, and nothing else. A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. The. Gyro Drift Rate.
From typeset.io
(PDF) MEMS gyro drift compensation using multiple rate measurements Gyro Drift Rate For example, bias can be due to the torque from the. In practice, all gyros have some sensitivity to acceleration due to asymmetry of. The rate gyroscope output is disturbed by two main groups of errors. The gyroscope drift is mainly due to the integration of two components: This drift appears as the integrated gyro angle taking random steps from. Gyro Drift Rate.
From avictech.en.made-in-china.com
Low Drift High Performance Low Price Fiber Gyro Angular Rate Sensor Gyro Drift Rate Measure of the instantaneous drift rate of the gyro and is due entirely to the fixed (r), unbalance (u., u«), and compliance (k) drift rates of the gyro. The rate gyroscope output is disturbed by two main groups of errors. This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle. Gyro Drift Rate.
From www.mdb.jp
GYD450 Rate Gyro RC Drift Cars 松本電子部品飯田 Gyro Drift Rate This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). Ideally a gyro would measure only rotational rate, and nothing else. A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. The gyroscope drift. Gyro Drift Rate.
From www.tkk-air.co.jp
Gyro Instruments Gyro Drift Rate This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. The rate gyroscope output is disturbed by two main groups of errors. Ideally a. Gyro Drift Rate.
From www.youtube.com
TUTORIAL Gyro drift calibration / ENGLISH YouTube Gyro Drift Rate This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. In practice, all gyros have some sensitivity to acceleration due to asymmetry of. For. Gyro Drift Rate.
From www.ricardo.ch
US MILITARY AIRCRAFT GYRO DRIFT METER Kaufen auf Ricardo Gyro Drift Rate For mechanical gyros, bias is sometimes called the acceleration insensitive drift rate. The gyroscope drift is mainly due to the integration of two components: This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). Measure of the instantaneous drift rate of the gyro and is due entirely. Gyro Drift Rate.
From avictech.en.made-in-china.com
Inertial Angular Rate Gyroscope Sensor Based on The Optical Sagnac Gyro Drift Rate This integration will drift over time due to sensor noise. Ideally a gyro would measure only rotational rate, and nothing else. For example, bias can be due to the torque from the. In practice, all gyros have some sensitivity to acceleration due to asymmetry of. This drift appears as the integrated gyro angle taking random steps from sample to sample,. Gyro Drift Rate.
From www.semanticscholar.org
Figure 1 from Modeling Random Gyro Drift Rate by Data Dependent Systems Gyro Drift Rate This integration will drift over time due to sensor noise. The gyroscope drift is mainly due to the integration of two components: A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. The rate gyroscope output is disturbed by two main groups of errors. For mechanical gyros,. Gyro Drift Rate.
From www.youtube.com
Directional Gyro Indicator Drift Rate Calculation DGI Operation Gyro Drift Rate For example, bias can be due to the torque from the. In practice, all gyros have some sensitivity to acceleration due to asymmetry of. The rate gyroscope output is disturbed by two main groups of errors. A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. Ideally. Gyro Drift Rate.
From www.agf-rc.com
AGFRC Dual Gain Drift Tuned Rated RC Car Gyros for Drift Car Gyro Drift Rate The gyroscope drift is mainly due to the integration of two components: This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. Ideally a. Gyro Drift Rate.
From www.youtube.com
Gyro Drift YouTube Gyro Drift Rate Ideally a gyro would measure only rotational rate, and nothing else. Measure of the instantaneous drift rate of the gyro and is due entirely to the fixed (r), unbalance (u., u«), and compliance (k) drift rates of the gyro. This integration will drift over time due to sensor noise. For mechanical gyros, bias is sometimes called the acceleration insensitive drift. Gyro Drift Rate.
From kayhobbies.at
Kayhobbis for RC Cars Drift Crawler SkyRC Drift Gyro Gyro Drift Rate The rate gyroscope output is disturbed by two main groups of errors. This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). Measure of the instantaneous drift rate of the gyro and is due entirely to the fixed (r), unbalance (u., u«), and compliance (k) drift rates. Gyro Drift Rate.
From www.lazada.com.my
AFRC GYS2 V4 Racing Gyro Drift Car Stabilizer Gyro Drift Car for MINI Gyro Drift Rate This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). Ideally a gyro would measure only rotational rate, and nothing else. This integration will drift over time due to sensor noise. Measure of the instantaneous drift rate of the gyro and is due entirely to the fixed. Gyro Drift Rate.
From www.ubuy.co.in
Buy AGFRC Mini Z Gyros Mini Gyros for Drifting MiniZ Car Full Gyro Drift Rate Measure of the instantaneous drift rate of the gyro and is due entirely to the fixed (r), unbalance (u., u«), and compliance (k) drift rates of the gyro. A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. This drift appears as the integrated gyro angle taking. Gyro Drift Rate.
From www.agf-rc.com
AGFRC Dual Gain Drift Tuned Rated RC Car Gyros for Drift Car Gyro Drift Rate For example, bias can be due to the torque from the. This integration will drift over time due to sensor noise. In practice, all gyros have some sensitivity to acceleration due to asymmetry of. The rate gyroscope output is disturbed by two main groups of errors. For mechanical gyros, bias is sometimes called the acceleration insensitive drift rate. This drift. Gyro Drift Rate.
From www.aliexpress.com
Afrc Gys2 V4 Racing Gyro Drift Car Stabilizer Gyro Drift Car For Mini Gyro Drift Rate The gyroscope drift is mainly due to the integration of two components: For mechanical gyros, bias is sometimes called the acceleration insensitive drift rate. This integration will drift over time due to sensor noise. In practice, all gyros have some sensitivity to acceleration due to asymmetry of. Ideally a gyro would measure only rotational rate, and nothing else. The rate. Gyro Drift Rate.
From www.scientific.net
Estimating Gyro Drift of Strapdown Inertial Navigation System Based on Gyro Drift Rate For example, bias can be due to the torque from the. This integration will drift over time due to sensor noise. In practice, all gyros have some sensitivity to acceleration due to asymmetry of. A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. Ideally a gyro. Gyro Drift Rate.
From www.rcdriver.com
Increase Steering & Install A Drift Gyro RC Driver Gyro Drift Rate A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. Measure of the instantaneous drift rate of the gyro and is due entirely to the fixed (r), unbalance (u., u«), and compliance (k) drift rates of the gyro. This integration will drift over time due to sensor. Gyro Drift Rate.
From discuss.px4.io
Gyro drift (?) makes Takeoff impossible (Pixhawk 2.1 / dji S900 Gyro Drift Rate This integration will drift over time due to sensor noise. A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. Measure of the instantaneous drift rate of the gyro and is due entirely to the fixed (r), unbalance (u., u«), and compliance (k) drift rates of the. Gyro Drift Rate.
From www.onisiki.com
Onisiki Daruma RC Gyro for RC Drift Cars 鬼式達摩 Gyro Drift Rate This drift appears as the integrated gyro angle taking random steps from sample to sample, hence the term gyro angle random walk (arw). In practice, all gyros have some sensitivity to acceleration due to asymmetry of. Ideally a gyro would measure only rotational rate, and nothing else. For mechanical gyros, bias is sometimes called the acceleration insensitive drift rate. A. Gyro Drift Rate.
From www.youtube.com
RC DRIFT GYRO PLACEMENT MATTERS FACTS REVEALED YouTube Gyro Drift Rate Ideally a gyro would measure only rotational rate, and nothing else. For mechanical gyros, bias is sometimes called the acceleration insensitive drift rate. For example, bias can be due to the torque from the. The rate gyroscope output is disturbed by two main groups of errors. This integration will drift over time due to sensor noise. The gyroscope drift is. Gyro Drift Rate.
From www.youtube.com
KYOSHO MINIZ AWD (MA020S) GYRO DRIFTING (PART 1) YouTube Gyro Drift Rate In practice, all gyros have some sensitivity to acceleration due to asymmetry of. Ideally a gyro would measure only rotational rate, and nothing else. For example, bias can be due to the torque from the. The rate gyroscope output is disturbed by two main groups of errors. For mechanical gyros, bias is sometimes called the acceleration insensitive drift rate. The. Gyro Drift Rate.
From www.made-in-china.com
3 Axis Gyro Sensor Low Drift Mems Gyro Sensor RS232 RS485 Gyroscope Gyro Drift Rate A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. Ideally a gyro would measure only rotational rate, and nothing else. The gyroscope drift is mainly due to the integration of two components: The rate gyroscope output is disturbed by two main groups of errors. For example,. Gyro Drift Rate.
From device.report
Futaba GYD 470 Rate Gyro for RC Drift Cars Instruction Manual Gyro Drift Rate This integration will drift over time due to sensor noise. The rate gyroscope output is disturbed by two main groups of errors. For mechanical gyros, bias is sometimes called the acceleration insensitive drift rate. For example, bias can be due to the torque from the. This drift appears as the integrated gyro angle taking random steps from sample to sample,. Gyro Drift Rate.
From www.youtube.com
gyro on/off 2wd drift YouTube Gyro Drift Rate In practice, all gyros have some sensitivity to acceleration due to asymmetry of. A technique is implemented to fuse the two measurements into a single estimate of rate with much lower drift thereby providing a technique. For example, bias can be due to the torque from the. This integration will drift over time due to sensor noise. Measure of the. Gyro Drift Rate.