Robot Arm Color
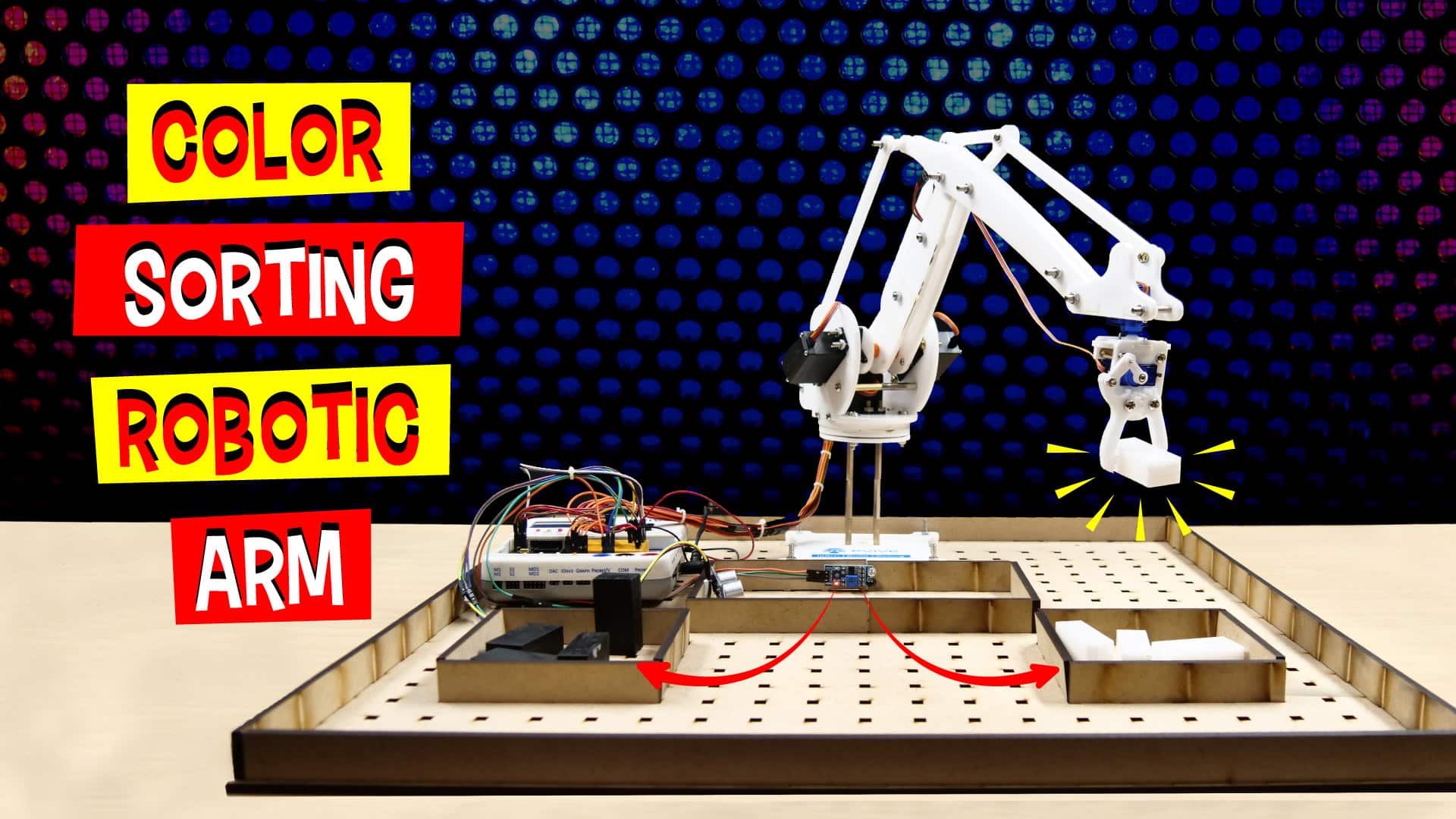
IntroductionIndustrial pick and place robotic arms are fascinating, aren't they? What if we told you that you could one make one that can sort objects based on their color? You heard us! In this project, in this project, we're going to show you how to make a DIY automatic pick and place color sorting robotic arm using components from the Robotic Arm Kit and cod it with ease in Pictoblox.
The color sorting mode is performed once the mode is turned on by the user. The robot arm able to differentiate the colors of the object (input) and categorize or classify the object to the correct places automatically. It provides a stable, efficient, and precision results without any vibration of control as the main target for this project.
Compare and analyze the codes of color sensor and AI vision module to implement color recognition and sorting by MaxArm, a ESP32 robot arm By Hammer X Hiwonder, Lucas Hiwonder, and David Hiwonder.
The packaging industry extensively utilizes robotic systems for sorting products, resulting in significant improvements in accuracy and efficiency. This paper presents the design and development of an innovative robotic arm that employs servo motors and an Arduino microcontroller to sort objects based on their color, using a TCS color sensor.
Premium AI Image | Color Robot Arm

4 DoF Robot Arm Pick & Place Color Sorter With Inverse Kinematic: In this project i build a 4 DoF robotic arm to do object sorting based on color. To build robotic system (at least like this project) it is not only programming and electrical field, but also required mechanical understating. Kinematic is a subfield.
Compare and analyze the codes of color sensor and AI vision module to implement color recognition and sorting by MaxArm, a ESP32 robot arm By Hammer X Hiwonder, Lucas Hiwonder, and David Hiwonder.
Explore comprehensive documentation for the Arduino-Based Robotic Arm with RGB Color Detection and Servo Control project, including components, wiring, and code. This project features an Arduino UNO controlling a robotic arm equipped with multiple servos and an Adafruit TCS34725 RGB color sensor. The system detects colors and performs specific movements based on the detected color, making it.
The color sorting mode is performed once the mode is turned on by the user. The robot arm able to differentiate the colors of the object (input) and categorize or classify the object to the correct places automatically. It provides a stable, efficient, and precision results without any vibration of control as the main target for this project.
Robotic Arm Set Collection In Many Color Grey Futuristic White And Blue ...
Welcome to the Vision Assisted Robotic Arm project! This project combines the power of computer vision and robotics to create an intelligent system capable of sorting objects by color. Utilizing an Arduino for control and OpenCV for image processing, this project demonstrates a seamless integration of hardware and software. This system leverages the capabilities of the Arduino Uno R3.
A robot is an electro-mechanical machine which reduces human efforts and increases efficiency. It is a real time machine which completes its given tasks in given time, with the help of computer programming. The paper presents the design and development of a robotic arm with the application of color sorting of spherical objects using advanced.
The packaging industry extensively utilizes robotic systems for sorting products, resulting in significant improvements in accuracy and efficiency. This paper presents the design and development of an innovative robotic arm that employs servo motors and an Arduino microcontroller to sort objects based on their color, using a TCS color sensor.
Explore comprehensive documentation for the Arduino-Based Robotic Arm with RGB Color Detection and Servo Control project, including components, wiring, and code. This project features an Arduino UNO controlling a robotic arm equipped with multiple servos and an Adafruit TCS34725 RGB color sensor. The system detects colors and performs specific movements based on the detected color, making it.
Make A Color Sorting Robotic Arm And Turn It Into The Automated Pick ...
4 DoF Robot Arm Pick & Place Color Sorter With Inverse Kinematic: In this project i build a 4 DoF robotic arm to do object sorting based on color. To build robotic system (at least like this project) it is not only programming and electrical field, but also required mechanical understating. Kinematic is a subfield.
The purpose of robots has always been to act as a substitute for human labor. This paper introduces the design and development of Robotic Arm with Proximity and Color Detection using Arduino Mega microcontroller. The robotic arm has six degrees of freedom (6-DOF). This project not only satisfies the criteria of being a substitute for tough human labor but also is a smart robot, since it can.
Welcome to the Vision Assisted Robotic Arm project! This project combines the power of computer vision and robotics to create an intelligent system capable of sorting objects by color. Utilizing an Arduino for control and OpenCV for image processing, this project demonstrates a seamless integration of hardware and software. This system leverages the capabilities of the Arduino Uno R3.
The packaging industry extensively utilizes robotic systems for sorting products, resulting in significant improvements in accuracy and efficiency. This paper presents the design and development of an innovative robotic arm that employs servo motors and an Arduino microcontroller to sort objects based on their color, using a TCS color sensor.
Industrial Robotic Arm Color Icon. Robot Hand. Isolated Vector ...
A robot is an electro-mechanical machine which reduces human efforts and increases efficiency. It is a real time machine which completes its given tasks in given time, with the help of computer programming. The paper presents the design and development of a robotic arm with the application of color sorting of spherical objects using advanced.
4 DoF Robot Arm Pick & Place Color Sorter With Inverse Kinematic: In this project i build a 4 DoF robotic arm to do object sorting based on color. To build robotic system (at least like this project) it is not only programming and electrical field, but also required mechanical understating. Kinematic is a subfield.
The packaging industry extensively utilizes robotic systems for sorting products, resulting in significant improvements in accuracy and efficiency. This paper presents the design and development of an innovative robotic arm that employs servo motors and an Arduino microcontroller to sort objects based on their color, using a TCS color sensor.
The purpose of robots has always been to act as a substitute for human labor. This paper introduces the design and development of Robotic Arm with Proximity and Color Detection using Arduino Mega microcontroller. The robotic arm has six degrees of freedom (6-DOF). This project not only satisfies the criteria of being a substitute for tough human labor but also is a smart robot, since it can.
Make A Color Sorting Robotic Arm And Turn It Into The Automated Pick ...
The color sorting mode is performed once the mode is turned on by the user. The robot arm able to differentiate the colors of the object (input) and categorize or classify the object to the correct places automatically. It provides a stable, efficient, and precision results without any vibration of control as the main target for this project.
Compare and analyze the codes of color sensor and AI vision module to implement color recognition and sorting by MaxArm, a ESP32 robot arm By Hammer X Hiwonder, Lucas Hiwonder, and David Hiwonder.
The purpose of robots has always been to act as a substitute for human labor. This paper introduces the design and development of Robotic Arm with Proximity and Color Detection using Arduino Mega microcontroller. The robotic arm has six degrees of freedom (6-DOF). This project not only satisfies the criteria of being a substitute for tough human labor but also is a smart robot, since it can.
Explore comprehensive documentation for the Arduino-Based Robotic Arm with RGB Color Detection and Servo Control project, including components, wiring, and code. This project features an Arduino UNO controlling a robotic arm equipped with multiple servos and an Adafruit TCS34725 RGB color sensor. The system detects colors and performs specific movements based on the detected color, making it.
Color Sorting Robotic Arm - YouTube

The color sorting mode is performed once the mode is turned on by the user. The robot arm able to differentiate the colors of the object (input) and categorize or classify the object to the correct places automatically. It provides a stable, efficient, and precision results without any vibration of control as the main target for this project.
4 DoF Robot Arm Pick & Place Color Sorter With Inverse Kinematic: In this project i build a 4 DoF robotic arm to do object sorting based on color. To build robotic system (at least like this project) it is not only programming and electrical field, but also required mechanical understating. Kinematic is a subfield.
Explore comprehensive documentation for the Arduino-Based Robotic Arm with RGB Color Detection and Servo Control project, including components, wiring, and code. This project features an Arduino UNO controlling a robotic arm equipped with multiple servos and an Adafruit TCS34725 RGB color sensor. The system detects colors and performs specific movements based on the detected color, making it.
Welcome to the Vision Assisted Robotic Arm project! This project combines the power of computer vision and robotics to create an intelligent system capable of sorting objects by color. Utilizing an Arduino for control and OpenCV for image processing, this project demonstrates a seamless integration of hardware and software. This system leverages the capabilities of the Arduino Uno R3.
Robotic Arm With Color Sensors - YouTube

The color sorting mode is performed once the mode is turned on by the user. The robot arm able to differentiate the colors of the object (input) and categorize or classify the object to the correct places automatically. It provides a stable, efficient, and precision results without any vibration of control as the main target for this project.
A robot is an electro-mechanical machine which reduces human efforts and increases efficiency. It is a real time machine which completes its given tasks in given time, with the help of computer programming. The paper presents the design and development of a robotic arm with the application of color sorting of spherical objects using advanced.
Explore comprehensive documentation for the Arduino-Based Robotic Arm with RGB Color Detection and Servo Control project, including components, wiring, and code. This project features an Arduino UNO controlling a robotic arm equipped with multiple servos and an Adafruit TCS34725 RGB color sensor. The system detects colors and performs specific movements based on the detected color, making it.
Welcome to the Vision Assisted Robotic Arm project! This project combines the power of computer vision and robotics to create an intelligent system capable of sorting objects by color. Utilizing an Arduino for control and OpenCV for image processing, this project demonstrates a seamless integration of hardware and software. This system leverages the capabilities of the Arduino Uno R3.
Arduino Robotic Arm, Color Sorting - YouTube

Compare and analyze the codes of color sensor and AI vision module to implement color recognition and sorting by MaxArm, a ESP32 robot arm By Hammer X Hiwonder, Lucas Hiwonder, and David Hiwonder.
IntroductionIndustrial pick and place robotic arms are fascinating, aren't they? What if we told you that you could one make one that can sort objects based on their color? You heard us! In this project, in this project, we're going to show you how to make a DIY automatic pick and place color sorting robotic arm using components from the Robotic Arm Kit and cod it with ease in Pictoblox.
The color sorting mode is performed once the mode is turned on by the user. The robot arm able to differentiate the colors of the object (input) and categorize or classify the object to the correct places automatically. It provides a stable, efficient, and precision results without any vibration of control as the main target for this project.
The purpose of robots has always been to act as a substitute for human labor. This paper introduces the design and development of Robotic Arm with Proximity and Color Detection using Arduino Mega microcontroller. The robotic arm has six degrees of freedom (6-DOF). This project not only satisfies the criteria of being a substitute for tough human labor but also is a smart robot, since it can.
Robot Arm Color Detection And Sorting - YouTube

Explore comprehensive documentation for the Arduino-Based Robotic Arm with RGB Color Detection and Servo Control project, including components, wiring, and code. This project features an Arduino UNO controlling a robotic arm equipped with multiple servos and an Adafruit TCS34725 RGB color sensor. The system detects colors and performs specific movements based on the detected color, making it.
A robot is an electro-mechanical machine which reduces human efforts and increases efficiency. It is a real time machine which completes its given tasks in given time, with the help of computer programming. The paper presents the design and development of a robotic arm with the application of color sorting of spherical objects using advanced.
Welcome to the Vision Assisted Robotic Arm project! This project combines the power of computer vision and robotics to create an intelligent system capable of sorting objects by color. Utilizing an Arduino for control and OpenCV for image processing, this project demonstrates a seamless integration of hardware and software. This system leverages the capabilities of the Arduino Uno R3.
4 DoF Robot Arm Pick & Place Color Sorter With Inverse Kinematic: In this project i build a 4 DoF robotic arm to do object sorting based on color. To build robotic system (at least like this project) it is not only programming and electrical field, but also required mechanical understating. Kinematic is a subfield.
Make A Color Sorting Robotic Arm And Turn It Into The Automated Pick ...
The color sorting mode is performed once the mode is turned on by the user. The robot arm able to differentiate the colors of the object (input) and categorize or classify the object to the correct places automatically. It provides a stable, efficient, and precision results without any vibration of control as the main target for this project.
4 DoF Robot Arm Pick & Place Color Sorter With Inverse Kinematic: In this project i build a 4 DoF robotic arm to do object sorting based on color. To build robotic system (at least like this project) it is not only programming and electrical field, but also required mechanical understating. Kinematic is a subfield.
The packaging industry extensively utilizes robotic systems for sorting products, resulting in significant improvements in accuracy and efficiency. This paper presents the design and development of an innovative robotic arm that employs servo motors and an Arduino microcontroller to sort objects based on their color, using a TCS color sensor.
IntroductionIndustrial pick and place robotic arms are fascinating, aren't they? What if we told you that you could one make one that can sort objects based on their color? You heard us! In this project, in this project, we're going to show you how to make a DIY automatic pick and place color sorting robotic arm using components from the Robotic Arm Kit and cod it with ease in Pictoblox.
Robotic Arm Robot Color Icon Vector Illustration Stock Vector Image ...
The purpose of robots has always been to act as a substitute for human labor. This paper introduces the design and development of Robotic Arm with Proximity and Color Detection using Arduino Mega microcontroller. The robotic arm has six degrees of freedom (6-DOF). This project not only satisfies the criteria of being a substitute for tough human labor but also is a smart robot, since it can.
The color sorting mode is performed once the mode is turned on by the user. The robot arm able to differentiate the colors of the object (input) and categorize or classify the object to the correct places automatically. It provides a stable, efficient, and precision results without any vibration of control as the main target for this project.
4 DoF Robot Arm Pick & Place Color Sorter With Inverse Kinematic: In this project i build a 4 DoF robotic arm to do object sorting based on color. To build robotic system (at least like this project) it is not only programming and electrical field, but also required mechanical understating. Kinematic is a subfield.
Compare and analyze the codes of color sensor and AI vision module to implement color recognition and sorting by MaxArm, a ESP32 robot arm By Hammer X Hiwonder, Lucas Hiwonder, and David Hiwonder.
MaxArm: Arduino Robot Arm Conduct Color Sorting In Two Ways - Hackster.io

The color sorting mode is performed once the mode is turned on by the user. The robot arm able to differentiate the colors of the object (input) and categorize or classify the object to the correct places automatically. It provides a stable, efficient, and precision results without any vibration of control as the main target for this project.
The purpose of robots has always been to act as a substitute for human labor. This paper introduces the design and development of Robotic Arm with Proximity and Color Detection using Arduino Mega microcontroller. The robotic arm has six degrees of freedom (6-DOF). This project not only satisfies the criteria of being a substitute for tough human labor but also is a smart robot, since it can.
The packaging industry extensively utilizes robotic systems for sorting products, resulting in significant improvements in accuracy and efficiency. This paper presents the design and development of an innovative robotic arm that employs servo motors and an Arduino microcontroller to sort objects based on their color, using a TCS color sensor.
Compare and analyze the codes of color sensor and AI vision module to implement color recognition and sorting by MaxArm, a ESP32 robot arm By Hammer X Hiwonder, Lucas Hiwonder, and David Hiwonder.
How To Make A Color Sorting Robotic ARM With Arduino + Code | Robotics ...

A robot is an electro-mechanical machine which reduces human efforts and increases efficiency. It is a real time machine which completes its given tasks in given time, with the help of computer programming. The paper presents the design and development of a robotic arm with the application of color sorting of spherical objects using advanced.
4 DoF Robot Arm Pick & Place Color Sorter With Inverse Kinematic: In this project i build a 4 DoF robotic arm to do object sorting based on color. To build robotic system (at least like this project) it is not only programming and electrical field, but also required mechanical understating. Kinematic is a subfield.
The packaging industry extensively utilizes robotic systems for sorting products, resulting in significant improvements in accuracy and efficiency. This paper presents the design and development of an innovative robotic arm that employs servo motors and an Arduino microcontroller to sort objects based on their color, using a TCS color sensor.
The purpose of robots has always been to act as a substitute for human labor. This paper introduces the design and development of Robotic Arm with Proximity and Color Detection using Arduino Mega microcontroller. The robotic arm has six degrees of freedom (6-DOF). This project not only satisfies the criteria of being a substitute for tough human labor but also is a smart robot, since it can.
Color Classification & Robot Arm Control - YouTube

Compare and analyze the codes of color sensor and AI vision module to implement color recognition and sorting by MaxArm, a ESP32 robot arm By Hammer X Hiwonder, Lucas Hiwonder, and David Hiwonder.
The packaging industry extensively utilizes robotic systems for sorting products, resulting in significant improvements in accuracy and efficiency. This paper presents the design and development of an innovative robotic arm that employs servo motors and an Arduino microcontroller to sort objects based on their color, using a TCS color sensor.
The color sorting mode is performed once the mode is turned on by the user. The robot arm able to differentiate the colors of the object (input) and categorize or classify the object to the correct places automatically. It provides a stable, efficient, and precision results without any vibration of control as the main target for this project.
Explore comprehensive documentation for the Arduino-Based Robotic Arm with RGB Color Detection and Servo Control project, including components, wiring, and code. This project features an Arduino UNO controlling a robotic arm equipped with multiple servos and an Adafruit TCS34725 RGB color sensor. The system detects colors and performs specific movements based on the detected color, making it.
Robotic Arm In Yellow Color. Autonomous Robot. Industrial Machine ...

The color sorting mode is performed once the mode is turned on by the user. The robot arm able to differentiate the colors of the object (input) and categorize or classify the object to the correct places automatically. It provides a stable, efficient, and precision results without any vibration of control as the main target for this project.
The purpose of robots has always been to act as a substitute for human labor. This paper introduces the design and development of Robotic Arm with Proximity and Color Detection using Arduino Mega microcontroller. The robotic arm has six degrees of freedom (6-DOF). This project not only satisfies the criteria of being a substitute for tough human labor but also is a smart robot, since it can.
A robot is an electro-mechanical machine which reduces human efforts and increases efficiency. It is a real time machine which completes its given tasks in given time, with the help of computer programming. The paper presents the design and development of a robotic arm with the application of color sorting of spherical objects using advanced.
Explore comprehensive documentation for the Arduino-Based Robotic Arm with RGB Color Detection and Servo Control project, including components, wiring, and code. This project features an Arduino UNO controlling a robotic arm equipped with multiple servos and an Adafruit TCS34725 RGB color sensor. The system detects colors and performs specific movements based on the detected color, making it.
A robot is an electro-mechanical machine which reduces human efforts and increases efficiency. It is a real time machine which completes its given tasks in given time, with the help of computer programming. The paper presents the design and development of a robotic arm with the application of color sorting of spherical objects using advanced.
The purpose of robots has always been to act as a substitute for human labor. This paper introduces the design and development of Robotic Arm with Proximity and Color Detection using Arduino Mega microcontroller. The robotic arm has six degrees of freedom (6-DOF). This project not only satisfies the criteria of being a substitute for tough human labor but also is a smart robot, since it can.
4 DoF Robot Arm Pick & Place Color Sorter With Inverse Kinematic: In this project i build a 4 DoF robotic arm to do object sorting based on color. To build robotic system (at least like this project) it is not only programming and electrical field, but also required mechanical understating. Kinematic is a subfield.
The color sorting mode is performed once the mode is turned on by the user. The robot arm able to differentiate the colors of the object (input) and categorize or classify the object to the correct places automatically. It provides a stable, efficient, and precision results without any vibration of control as the main target for this project.
Explore comprehensive documentation for the Arduino-Based Robotic Arm with RGB Color Detection and Servo Control project, including components, wiring, and code. This project features an Arduino UNO controlling a robotic arm equipped with multiple servos and an Adafruit TCS34725 RGB color sensor. The system detects colors and performs specific movements based on the detected color, making it.
The packaging industry extensively utilizes robotic systems for sorting products, resulting in significant improvements in accuracy and efficiency. This paper presents the design and development of an innovative robotic arm that employs servo motors and an Arduino microcontroller to sort objects based on their color, using a TCS color sensor.
Welcome to the Vision Assisted Robotic Arm project! This project combines the power of computer vision and robotics to create an intelligent system capable of sorting objects by color. Utilizing an Arduino for control and OpenCV for image processing, this project demonstrates a seamless integration of hardware and software. This system leverages the capabilities of the Arduino Uno R3.
IntroductionIndustrial pick and place robotic arms are fascinating, aren't they? What if we told you that you could one make one that can sort objects based on their color? You heard us! In this project, in this project, we're going to show you how to make a DIY automatic pick and place color sorting robotic arm using components from the Robotic Arm Kit and cod it with ease in Pictoblox.
Compare and analyze the codes of color sensor and AI vision module to implement color recognition and sorting by MaxArm, a ESP32 robot arm By Hammer X Hiwonder, Lucas Hiwonder, and David Hiwonder.