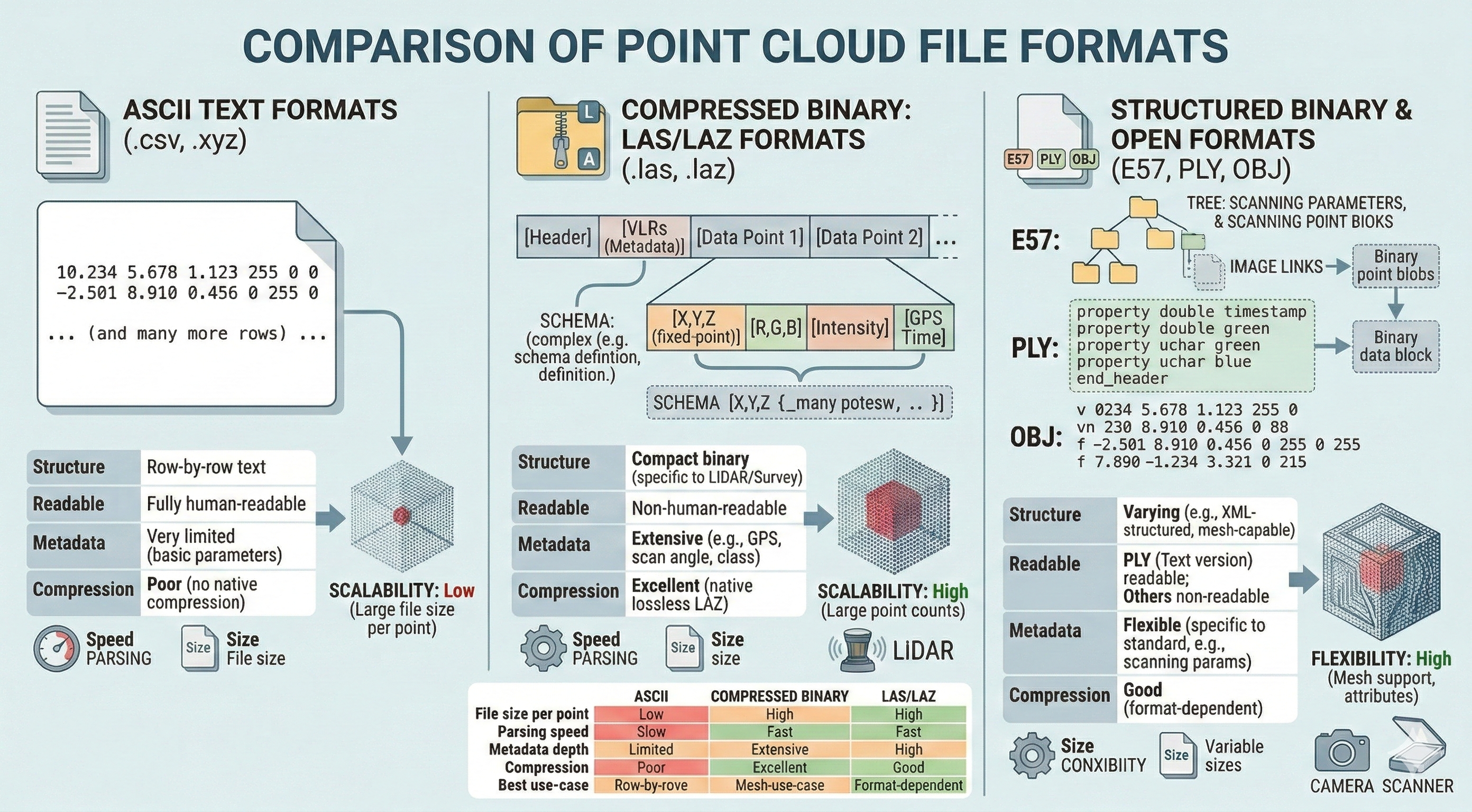
💾 FILE FORMAT COMPARISON
ASCII Formats
.xyz, .txt, .csv
✅ Human readable
✅ Universal compatibility
❌ Large file sizes
❌ No metadata
❌ Slow I/O
✅ Human readable
✅ Universal compatibility
❌ Large file sizes
❌ No metadata
❌ Slow I/O
LAS/LAZ Formats
.las, .laz
✅ Industry standard
✅ Metadata support
✅ Compression (LAZ)
❌ Not human readable
❌ Limited mesh support
✅ Industry standard
✅ Metadata support
✅ Compression (LAZ)
❌ Not human readable
❌ Limited mesh support
Binary Formats
.ply, .e57, .obj, .npy
✅ Flexible structure
✅ Mesh + cloud
✅ Fast I/O
❌ Limited standard
❌ Software dependent
✅ Flexible structure
✅ Mesh + cloud
✅ Fast I/O
❌ Limited standard
❌ Software dependent