

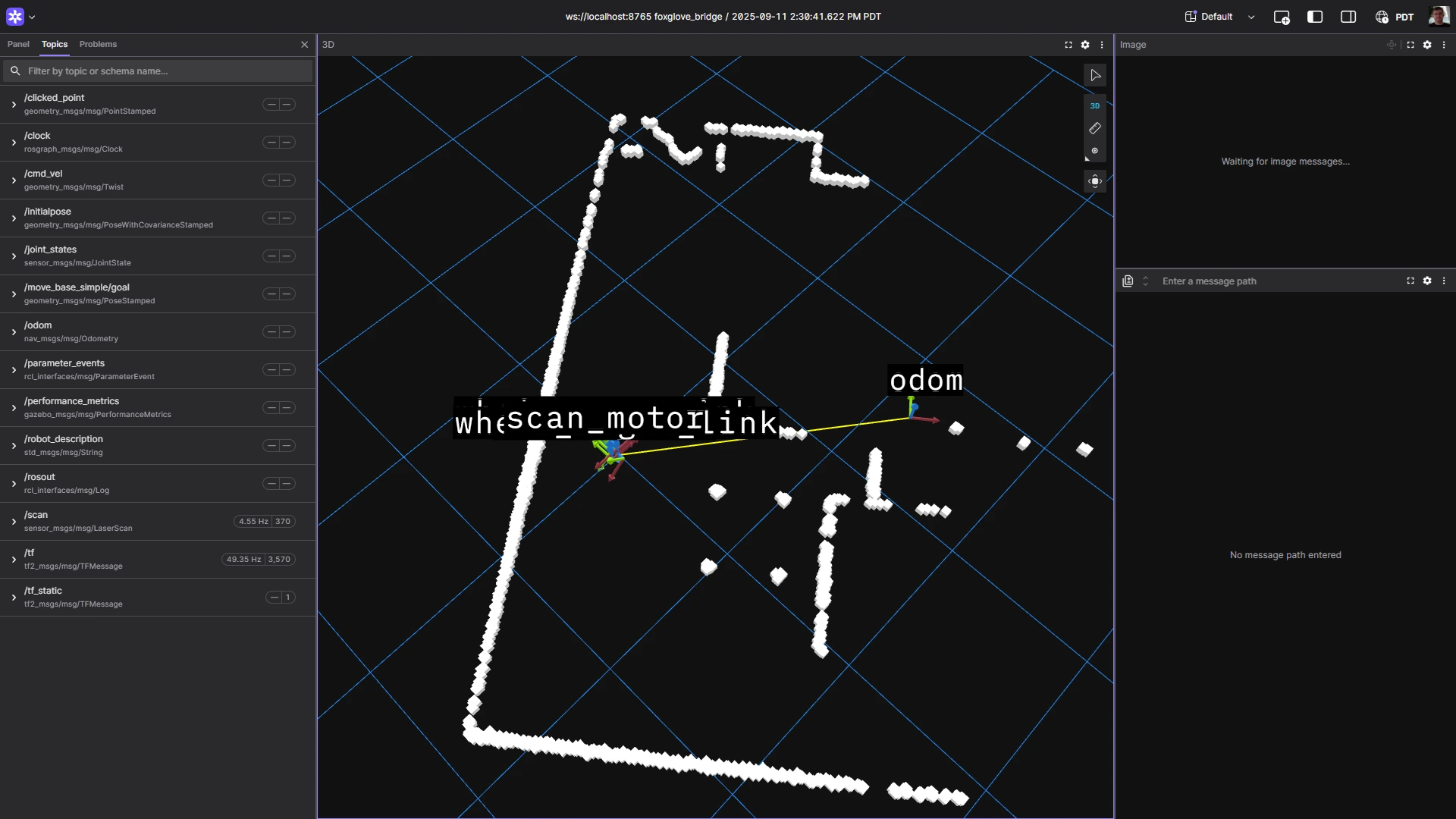
Use Foxglove to stream multimodal robotics data using ROS 2 or replay it from MCAP files. Visualizing ROS 2 data with Foxglove Foxglove is a visualization and observability tool for robotics developers. It's available in the browser or as a standalone desktop app and is free for individual, small team, and academic use.

Installation To use Foxglove, you'll need to create an account. It's free and all you need is a valid email. Installing and Running the Foxglove ROS2 Bridge To connect ROS 2 to Foxglove, you need to run the ROS Foxglove Bridge, which converts ROS and ROS 2 topics into a WebSocket stream that Foxglove can read.

Installation Please take a look at Foxglove's documentation to make sure the bridge is available in your ROS/ROS2 distribution. Step-by-step guide to ROS2 datasets. Learn recording, replay, and visualization with Foxglove, RViz, and TurtleBot3 SLAM.
Launch Start the foxglove_bridge from your ROS workspace using roslaunch in ROS 1 or ros2 launch in ROS 2. Optional configurations and their default values are below. The foxglove_bridge uses the Foxglove SDK (this repo!), a similar protocol to rosbridge but with the ability to support additional schema formats such as ROS 2.msg and ROS 2.idl, parameters, graph introspection, and non.
Foxglove and PULSE foxgloveCalyoPulse is a custom extension for Foxglove that allows you to visualise data from the PULSE sensor within ROS2 environments. This tool helps you quickly access and interpret sensor outputs, making development and troubleshooting smoother. Why Use foxgloveCalyoPulse?

Foxglove is a purpose-built platform that empowers robotics teams to visually debug robots, build reliable autonomy, and scale their development. Visualizing ROS 2 data with Foxglove Studio Foxglove Studio is an open source visualization and debugging tool for your robotics data. It is available in a variety of ways to make development as convenient as possible - it can be run as a standalone desktop app, accessed via your browser, or even self.