
Foxglove is a purpose-built platform that empowers robotics teams to visually debug robots, build reliable autonomy, and scale their development. The Foxglove SDK can be used to log messages to MCAP files or the Foxglove app for live visualization. The Foxglove SDK allows you to log and visualize multimodal data with Foxglove.
The core SDK is written in Rust, with bindings for Python, and C++. We publish prebuilt libraries and Python wheels, so you don't need a Rust development environment. Stream live data to Foxglove over a local WebSocket Log data to MCAP files for visualization or analysis Leverage built.
The official Foxglove SDK. This crate provides support for integrating with the Foxglove platform. It can be used to log events to local MCAP files or a local visualization server that communicates with the Foxglove app.
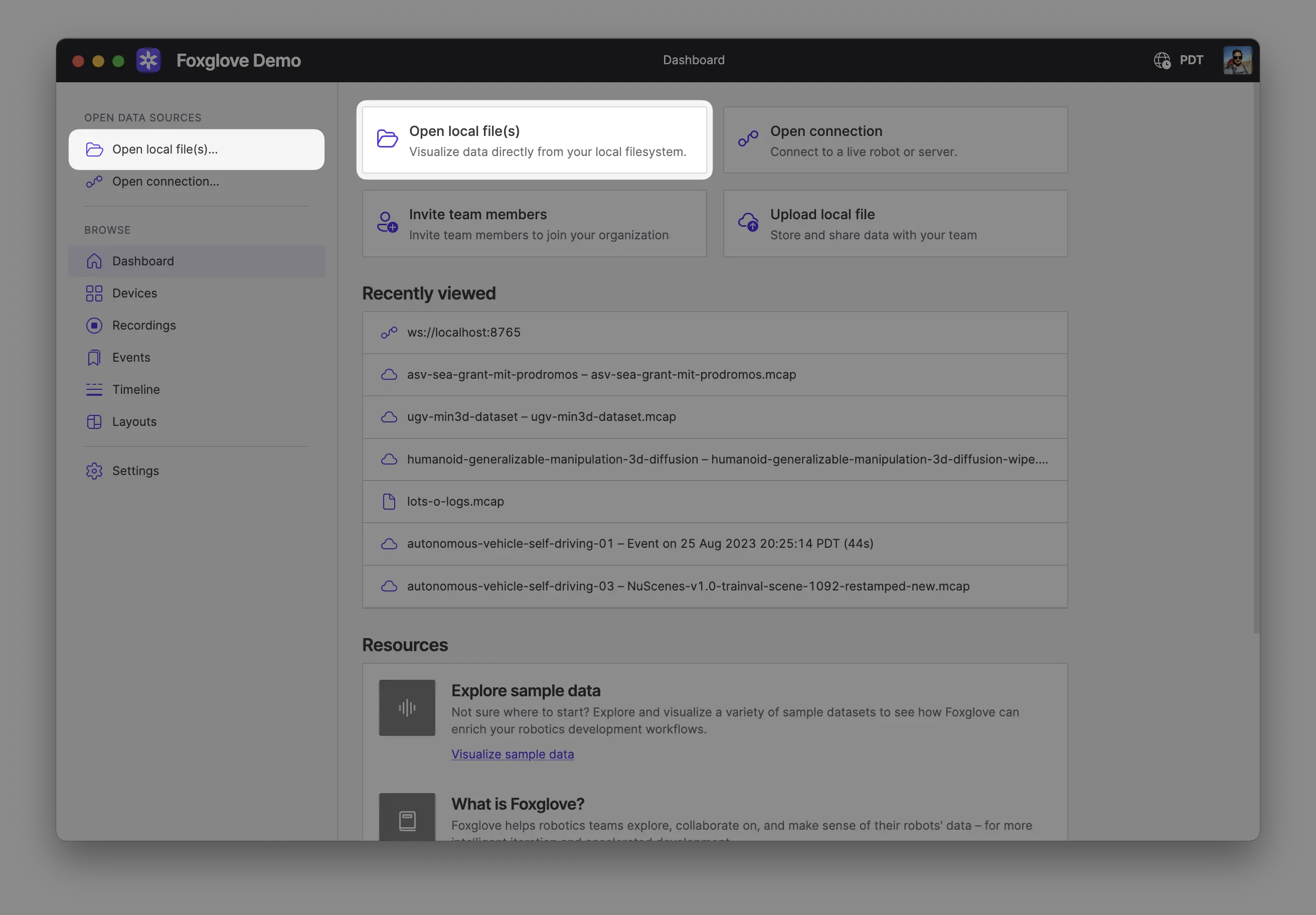
Getting started The easiest way to get started is to install the foxglove crate with default features, which will allow logging messages to the Foxglove app and to an MCAP file. From the Foxglove dashboard or menu, select "Open local file" and navigate to your recorded.mcap file. See the Foxglove documentation for more information about the types of data sources you can use with it.

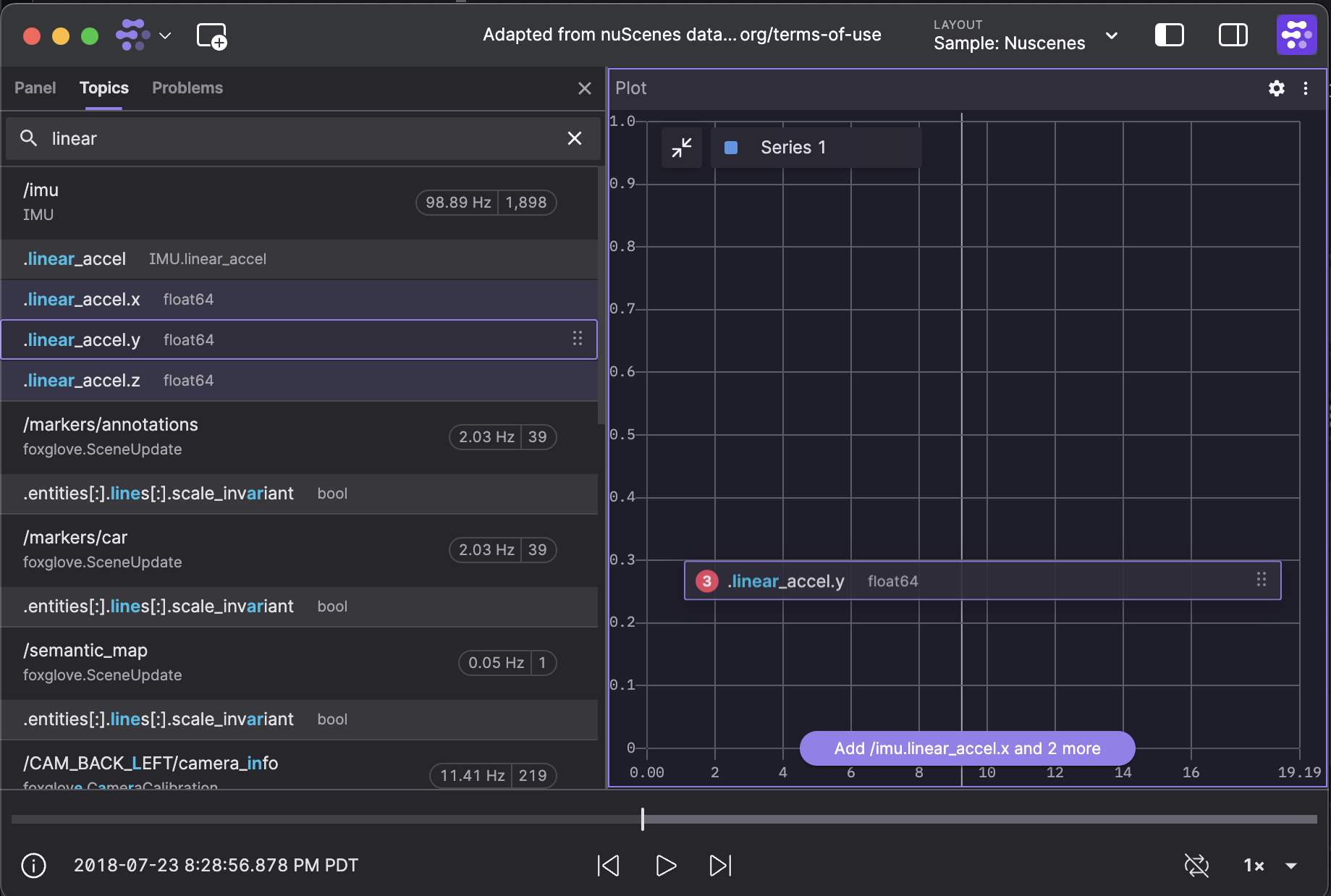
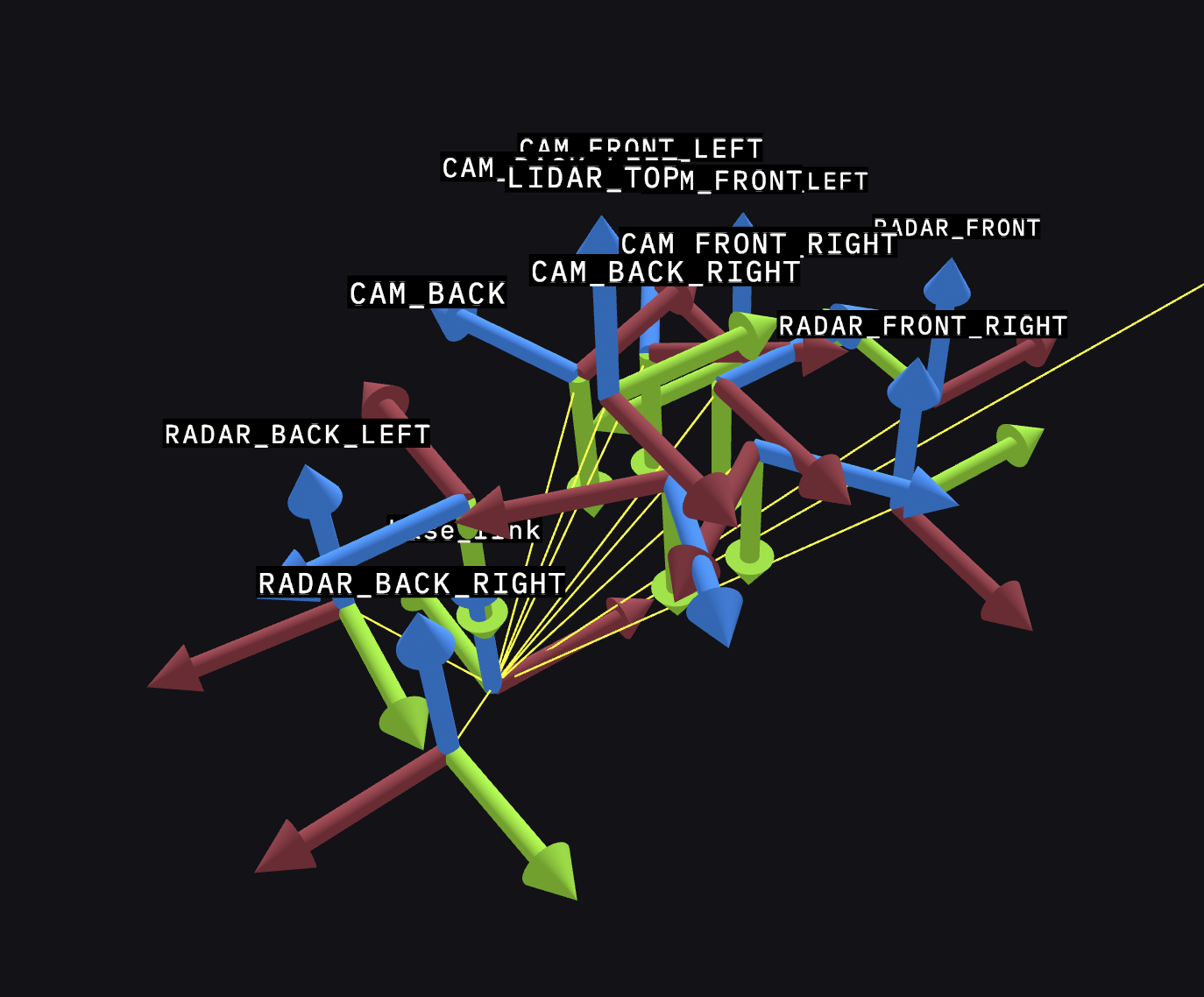
Building layouts with panels Panels allow you to visualize different specific types of data such as logs, maps, plots, and 3D. Documentation: https://docs.foxglove.dev/ Features Foxglove can inspect your robotics data via a running ROS connection (i.e. a live robot, simulation, etc.) or from a recorded ROS.bag file.
Most ROS tools are only supported on Linux, but Foxglove works cross-platform on Linux, Windows, and macOS. The Foxglove SDK is a multi-language toolkit for logging and visualizing multimodal data with $1. This document provides an overview of the entire SDK repository, its architecture, and how its compone.
In Foxglove, select "Open connection" from the dashboard or left-hand menu. Select "Foxglove WebSocket" in the "Open a new connection" dialog, then click "Open" to accept the default connection string. Log messages to an MCAP file and the Foxglove app for live visualization.
Log data to MCAP files for visualization or analysis Leverage built-in Foxglove schemas for common visualizations, or your own custom messages using a supported serialization format ROS packages are available for all supported distributions (see our ROS 2 tutorial) Visit Foxglove SDK Docs to get started.