Firmata Servo Example . Then we can cover some basic functions like the. Here is a video for setting up a. I will be using the pycharm ide for this project, but any other method of coding with python should work. /* * firmata is a generic protocol for communicating with microcontrollers * from software on a host computer. On the personal computer we use kurbatov’s firmata4j library. Configure a pin as servo with min_pulse, max_pulse and first angle. Go to 'file', 'examples', 'firmata', 'standardfirmata' plug in your. In this tutorial, you'll learn how to control a servo using your voice! Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the arduino with no additional power. On the arduino we use the standard firmata program, built into the arduino ide. I will walk you through installing the necessary python libraries and setting up your arduino. Min_pulse and max_pulse default to the arduino defaults. Moving an arduino servo motor with pyfirmata (python) needs pyfirmata to be imported:
from exoxeyaae.blob.core.windows.net
/* * firmata is a generic protocol for communicating with microcontrollers * from software on a host computer. Then we can cover some basic functions like the. On the personal computer we use kurbatov’s firmata4j library. Configure a pin as servo with min_pulse, max_pulse and first angle. On the arduino we use the standard firmata program, built into the arduino ide. I will be using the pycharm ide for this project, but any other method of coding with python should work. Here is a video for setting up a. Go to 'file', 'examples', 'firmata', 'standardfirmata' plug in your. Min_pulse and max_pulse default to the arduino defaults. Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the arduino with no additional power.
Arduino Servo Zuckt at Bette Reese blog
Firmata Servo Example Min_pulse and max_pulse default to the arduino defaults. Then we can cover some basic functions like the. On the arduino we use the standard firmata program, built into the arduino ide. Configure a pin as servo with min_pulse, max_pulse and first angle. I will be using the pycharm ide for this project, but any other method of coding with python should work. /* * firmata is a generic protocol for communicating with microcontrollers * from software on a host computer. Min_pulse and max_pulse default to the arduino defaults. Go to 'file', 'examples', 'firmata', 'standardfirmata' plug in your. Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the arduino with no additional power. Moving an arduino servo motor with pyfirmata (python) needs pyfirmata to be imported: I will walk you through installing the necessary python libraries and setting up your arduino. In this tutorial, you'll learn how to control a servo using your voice! Here is a video for setting up a. On the personal computer we use kurbatov’s firmata4j library.
From fibasile.github.io
FirmataObjC controlling Arduino from ObjC Apps Firmata Servo Example Min_pulse and max_pulse default to the arduino defaults. On the personal computer we use kurbatov’s firmata4j library. Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the arduino with no additional power. /* * firmata is a generic protocol for communicating with microcontrollers * from software on a host computer. Here. Firmata Servo Example.
From www.youtube.com
Tutorial 26 Firmata, Parte 9 Arduino YouTube Firmata Servo Example Go to 'file', 'examples', 'firmata', 'standardfirmata' plug in your. Here is a video for setting up a. On the personal computer we use kurbatov’s firmata4j library. Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the arduino with no additional power. Then we can cover some basic functions like the. Min_pulse. Firmata Servo Example.
From exoxeyaae.blob.core.windows.net
Arduino Servo Zuckt at Bette Reese blog Firmata Servo Example Min_pulse and max_pulse default to the arduino defaults. I will walk you through installing the necessary python libraries and setting up your arduino. Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the arduino with no additional power. I will be using the pycharm ide for this project, but any other. Firmata Servo Example.
From www.youtube.com
Servo tutorial How does a servo motor work? / How to use a servo Firmata Servo Example I will be using the pycharm ide for this project, but any other method of coding with python should work. Configure a pin as servo with min_pulse, max_pulse and first angle. /* * firmata is a generic protocol for communicating with microcontrollers * from software on a host computer. Then we can cover some basic functions like the. Firmata can. Firmata Servo Example.
From docs-old.arduino.cc
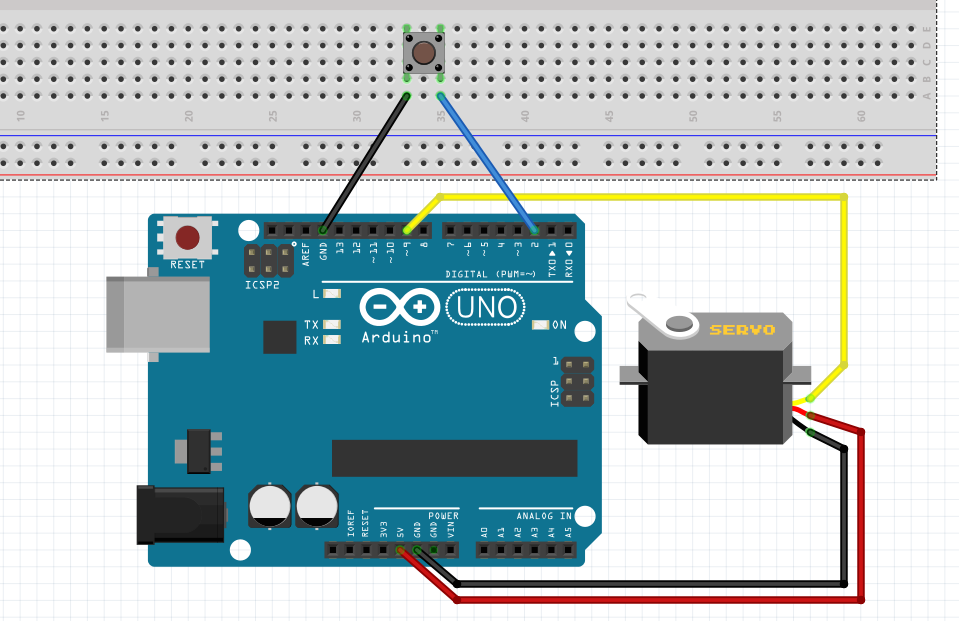
The Knob Circuit. Firmata Servo Example Here is a video for setting up a. Moving an arduino servo motor with pyfirmata (python) needs pyfirmata to be imported: On the arduino we use the standard firmata program, built into the arduino ide. I will walk you through installing the necessary python libraries and setting up your arduino. In this tutorial, you'll learn how to control a servo. Firmata Servo Example.
From forum.derivative.ca
Arduino on Firmata Shared .tox Components TouchDesigner forum Firmata Servo Example Moving an arduino servo motor with pyfirmata (python) needs pyfirmata to be imported: On the arduino we use the standard firmata program, built into the arduino ide. On the personal computer we use kurbatov’s firmata4j library. Here is a video for setting up a. Then we can cover some basic functions like the. Configure a pin as servo with min_pulse,. Firmata Servo Example.
From siytek.com
Home Assistant & ESPHome Servo Example (StepbyStep guide) Siytek Firmata Servo Example /* * firmata is a generic protocol for communicating with microcontrollers * from software on a host computer. I will walk you through installing the necessary python libraries and setting up your arduino. I will be using the pycharm ide for this project, but any other method of coding with python should work. Then we can cover some basic functions. Firmata Servo Example.
From wiki.seeedstudio.com
Firmata for Arduino Compatible Boards Seeed Studio Wiki Firmata Servo Example Then we can cover some basic functions like the. Configure a pin as servo with min_pulse, max_pulse and first angle. /* * firmata is a generic protocol for communicating with microcontrollers * from software on a host computer. Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the arduino with no. Firmata Servo Example.
From www.youtube.com
Arduino and servo motor with TouchDesigner YouTube Firmata Servo Example Then we can cover some basic functions like the. Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the arduino with no additional power. On the arduino we use the standard firmata program, built into the arduino ide. Min_pulse and max_pulse default to the arduino defaults. In this tutorial, you'll learn. Firmata Servo Example.
From microdigisoft.com
Interfacing SG90 Servo Motor Control with Raspberry Pi Firmata Servo Example On the arduino we use the standard firmata program, built into the arduino ide. In this tutorial, you'll learn how to control a servo using your voice! Moving an arduino servo motor with pyfirmata (python) needs pyfirmata to be imported: Configure a pin as servo with min_pulse, max_pulse and first angle. /* * firmata is a generic protocol for communicating. Firmata Servo Example.
From fyodxdrnj.blob.core.windows.net
Servo Motor Buzzing Sound at Miriam Roberts blog Firmata Servo Example I will be using the pycharm ide for this project, but any other method of coding with python should work. Min_pulse and max_pulse default to the arduino defaults. Configure a pin as servo with min_pulse, max_pulse and first angle. Then we can cover some basic functions like the. /* * firmata is a generic protocol for communicating with microcontrollers *. Firmata Servo Example.
From github.com
GitHub TOWR5291/FTCServoExample Firmata Servo Example Then we can cover some basic functions like the. Go to 'file', 'examples', 'firmata', 'standardfirmata' plug in your. In this tutorial, you'll learn how to control a servo using your voice! Min_pulse and max_pulse default to the arduino defaults. /* * firmata is a generic protocol for communicating with microcontrollers * from software on a host computer. Configure a pin. Firmata Servo Example.
From webmotor.org
Servo Motor Connection With Arduino Nano Firmata Servo Example Configure a pin as servo with min_pulse, max_pulse and first angle. In this tutorial, you'll learn how to control a servo using your voice! On the personal computer we use kurbatov’s firmata4j library. Go to 'file', 'examples', 'firmata', 'standardfirmata' plug in your. Moving an arduino servo motor with pyfirmata (python) needs pyfirmata to be imported: I will walk you through. Firmata Servo Example.
From schematicalkajos2t.z21.web.core.windows.net
4l60e Servo Diagram Firmata Servo Example Configure a pin as servo with min_pulse, max_pulse and first angle. Min_pulse and max_pulse default to the arduino defaults. Here is a video for setting up a. On the personal computer we use kurbatov’s firmata4j library. I will be using the pycharm ide for this project, but any other method of coding with python should work. I will walk you. Firmata Servo Example.
From www.reddit.com
Used Arduino servo firmata and python to make a robot hand controlled Firmata Servo Example Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the arduino with no additional power. On the personal computer we use kurbatov’s firmata4j library. Go to 'file', 'examples', 'firmata', 'standardfirmata' plug in your. Here is a video for setting up a. On the arduino we use the standard firmata program, built. Firmata Servo Example.
From www.youtube.com
Driving a Servomotor from a Python🐍Tkinter GUI via pyFirmata + Firmata Servo Example /* * firmata is a generic protocol for communicating with microcontrollers * from software on a host computer. I will be using the pycharm ide for this project, but any other method of coding with python should work. On the personal computer we use kurbatov’s firmata4j library. On the arduino we use the standard firmata program, built into the arduino. Firmata Servo Example.
From hxemspvey.blob.core.windows.net
Servo Pins In Arduino Uno at Graham blog Firmata Servo Example On the personal computer we use kurbatov’s firmata4j library. Then we can cover some basic functions like the. Min_pulse and max_pulse default to the arduino defaults. On the arduino we use the standard firmata program, built into the arduino ide. Go to 'file', 'examples', 'firmata', 'standardfirmata' plug in your. Configure a pin as servo with min_pulse, max_pulse and first angle.. Firmata Servo Example.
From www.youtube.com
Tutorial Pemrograman Arduino [Medium] Tutorial Servo Motor Arduino Firmata Servo Example Here is a video for setting up a. Then we can cover some basic functions like the. Moving an arduino servo motor with pyfirmata (python) needs pyfirmata to be imported: Go to 'file', 'examples', 'firmata', 'standardfirmata' plug in your. Configure a pin as servo with min_pulse, max_pulse and first angle. Min_pulse and max_pulse default to the arduino defaults. Firmata can. Firmata Servo Example.
From docs.arduino.cc
Basic servo control Arduino Documentation Firmata Servo Example Configure a pin as servo with min_pulse, max_pulse and first angle. Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the arduino with no additional power. Here is a video for setting up a. Min_pulse and max_pulse default to the arduino defaults. /* * firmata is a generic protocol for communicating. Firmata Servo Example.
From hxeqvyaem.blob.core.windows.net
Esp32 Servo Motor Control at Don Savage blog Firmata Servo Example Min_pulse and max_pulse default to the arduino defaults. In this tutorial, you'll learn how to control a servo using your voice! On the personal computer we use kurbatov’s firmata4j library. Moving an arduino servo motor with pyfirmata (python) needs pyfirmata to be imported: On the arduino we use the standard firmata program, built into the arduino ide. Configure a pin. Firmata Servo Example.
From exocuwmfb.blob.core.windows.net
Attach Servo To Arduino at Adele McCallum blog Firmata Servo Example Configure a pin as servo with min_pulse, max_pulse and first angle. Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the arduino with no additional power. On the arduino we use the standard firmata program, built into the arduino ide. I will be using the pycharm ide for this project, but. Firmata Servo Example.
From hxebkfjvl.blob.core.windows.net
Arduino Servos Voltage at Jami Jensen blog Firmata Servo Example Min_pulse and max_pulse default to the arduino defaults. On the arduino we use the standard firmata program, built into the arduino ide. Here is a video for setting up a. Configure a pin as servo with min_pulse, max_pulse and first angle. I will be using the pycharm ide for this project, but any other method of coding with python should. Firmata Servo Example.
From www.circuitbasics.com
How to Control an Arduino from a Raspberry Pi Circuit Basics Firmata Servo Example Here is a video for setting up a. On the personal computer we use kurbatov’s firmata4j library. Moving an arduino servo motor with pyfirmata (python) needs pyfirmata to be imported: /* * firmata is a generic protocol for communicating with microcontrollers * from software on a host computer. In this tutorial, you'll learn how to control a servo using your. Firmata Servo Example.
From fyooqudwl.blob.core.windows.net
Servo Position Arduino at Ann Terry blog Firmata Servo Example On the arduino we use the standard firmata program, built into the arduino ide. Go to 'file', 'examples', 'firmata', 'standardfirmata' plug in your. /* * firmata is a generic protocol for communicating with microcontrollers * from software on a host computer. Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the. Firmata Servo Example.
From www.youtube.com
Moviendo un servo con MYOPENLAB y Firmata protocol YouTube Firmata Servo Example In this tutorial, you'll learn how to control a servo using your voice! Min_pulse and max_pulse default to the arduino defaults. On the personal computer we use kurbatov’s firmata4j library. Configure a pin as servo with min_pulse, max_pulse and first angle. On the arduino we use the standard firmata program, built into the arduino ide. Moving an arduino servo motor. Firmata Servo Example.
From exoqyeokb.blob.core.windows.net
Servo For Sale South Australia at Sam McLaughlin blog Firmata Servo Example I will walk you through installing the necessary python libraries and setting up your arduino. On the personal computer we use kurbatov’s firmata4j library. On the arduino we use the standard firmata program, built into the arduino ide. In this tutorial, you'll learn how to control a servo using your voice! Moving an arduino servo motor with pyfirmata (python) needs. Firmata Servo Example.
From roboticsbackend.com
Arduino Standard Firmata Tutorial The Robotics BackEnd Firmata Servo Example I will be using the pycharm ide for this project, but any other method of coding with python should work. Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the arduino with no additional power. Configure a pin as servo with min_pulse, max_pulse and first angle. Here is a video for. Firmata Servo Example.
From www.youtube.com
Python + Arduino + Servo + Led con Firmata YouTube Firmata Servo Example Then we can cover some basic functions like the. In this tutorial, you'll learn how to control a servo using your voice! Moving an arduino servo motor with pyfirmata (python) needs pyfirmata to be imported: I will be using the pycharm ide for this project, but any other method of coding with python should work. Here is a video for. Firmata Servo Example.
From plc247.com
PLC Omron "Servo Control" Delta B2 Tutorial Firmata Servo Example I will walk you through installing the necessary python libraries and setting up your arduino. Min_pulse and max_pulse default to the arduino defaults. Then we can cover some basic functions like the. In this tutorial, you'll learn how to control a servo using your voice! On the personal computer we use kurbatov’s firmata4j library. Go to 'file', 'examples', 'firmata', 'standardfirmata'. Firmata Servo Example.
From turboflip.de
Processing2Arduino optimized firmata setup UPDATED! TURBOFLIP Firmata Servo Example Then we can cover some basic functions like the. Go to 'file', 'examples', 'firmata', 'standardfirmata' plug in your. /* * firmata is a generic protocol for communicating with microcontrollers * from software on a host computer. I will be using the pycharm ide for this project, but any other method of coding with python should work. In this tutorial, you'll. Firmata Servo Example.
From www.vrogue.co
Esp32 Joystick Esp32 Tutorial vrogue.co Firmata Servo Example Here is a video for setting up a. Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the arduino with no additional power. On the arduino we use the standard firmata program, built into the arduino ide. Then we can cover some basic functions like the. Configure a pin as servo. Firmata Servo Example.
From www.youtube.com
Controlling Servo motor with Arduino and python YouTube Firmata Servo Example In this tutorial, you'll learn how to control a servo using your voice! Go to 'file', 'examples', 'firmata', 'standardfirmata' plug in your. I will walk you through installing the necessary python libraries and setting up your arduino. Firmata can drive hobby servos, and if you’re not driving too many, you can run them straight from the arduino with no additional. Firmata Servo Example.
From exovnnofq.blob.core.windows.net
How To Make Servo Motor From Dc Motor at Quincy Lara blog Firmata Servo Example I will be using the pycharm ide for this project, but any other method of coding with python should work. Then we can cover some basic functions like the. Here is a video for setting up a. Min_pulse and max_pulse default to the arduino defaults. /* * firmata is a generic protocol for communicating with microcontrollers * from software on. Firmata Servo Example.
From github.com
Servo not working on pins above 11 or 15 (depending on board) in Firmata Servo Example Go to 'file', 'examples', 'firmata', 'standardfirmata' plug in your. I will walk you through installing the necessary python libraries and setting up your arduino. Min_pulse and max_pulse default to the arduino defaults. Here is a video for setting up a. I will be using the pycharm ide for this project, but any other method of coding with python should work.. Firmata Servo Example.
From schematicyamazombe0u.z22.web.core.windows.net
Arduino Servo Motor Schematic Firmata Servo Example /* * firmata is a generic protocol for communicating with microcontrollers * from software on a host computer. On the personal computer we use kurbatov’s firmata4j library. On the arduino we use the standard firmata program, built into the arduino ide. Here is a video for setting up a. Then we can cover some basic functions like the. Moving an. Firmata Servo Example.