Computational Aesthetics in Graphics, Visualization and Imaging (2012)
Feedback-guided Stroke Placement for a
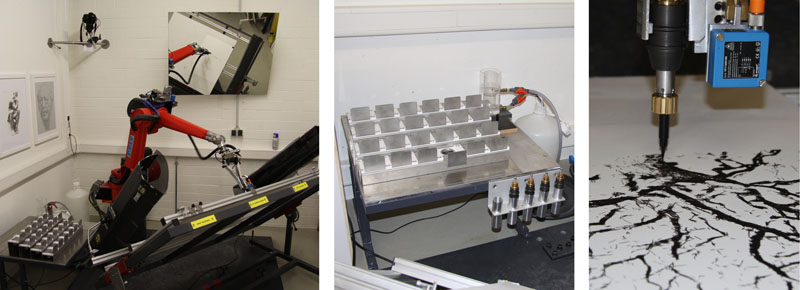
Painting Machine
In this paper we present and evaluate painterly rendering techniques that work within a visual feedback loop of
eDavid, our painting robot. The machine aims at simulating the human painting process. Two such methods are
compared for different objects. One uses a predefined set of stroke candidates, the other creates strokes directly
using line integral convolution. The aesthetics of both methods are discussed, results are shown.
Video
Paper
Additional Material
| [click on the images to get a bigger version] |
Bibtex
@inproceedings{COMPAESTH12:25-33:2012,
crossref = {COMPAESTH12-proc},
author = {Oliver Deussen and Thomas Lindemeier and Sören Pirk and Mark Tautzenberger},
title = {{Feedback-guided Stroke Placement for a Painting Machine}},
pages = {25-33},
URL = {http://diglib.eg.org/EG/DL/WS/COMPAESTH/COMPAESTH12/025-033.pdf},
DOI = {10.2312/COMPAESTH/COMPAESTH12/025-033},
}