Our Project
Hannah and Kaitlyn made some robots and they were pretty awesome.
Contents
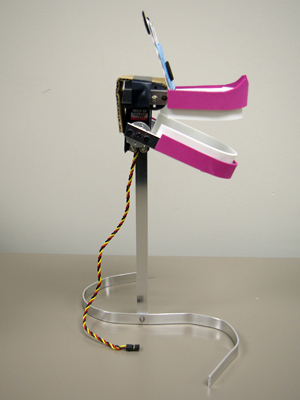
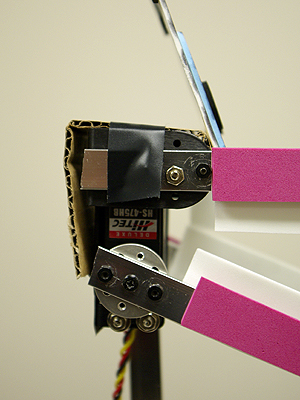
Talking Head
This was the first thing we created with servos, before we knew the correct way to fit the brackets together. Our talking head consists of one servo attached to both an ASB-04 bracket, and an ASB-03 bracket. The bottom jaw (formed from a strip of metal) is attached to the horn of the servo.
Using the software VSA, we were able to sync the mouth's movement to an audio file. You can download a .zip file containing the audio file and the VSA project file below. For more information on how to sync a servo's animation to an audio file, see the "How-Tos" section of this learning centre.

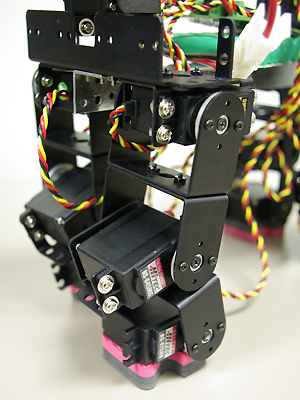
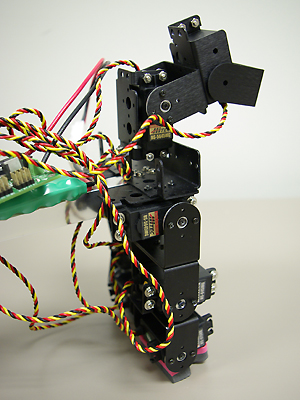
Walking Pony
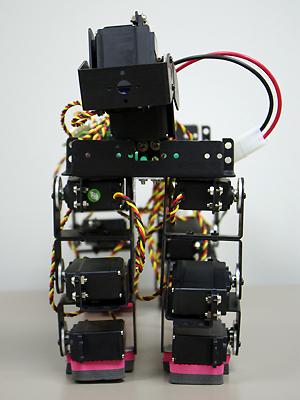
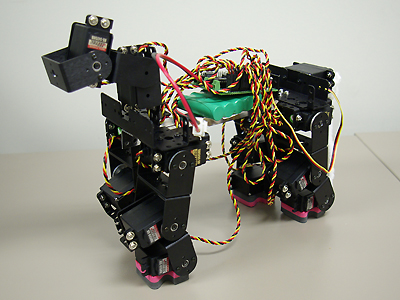
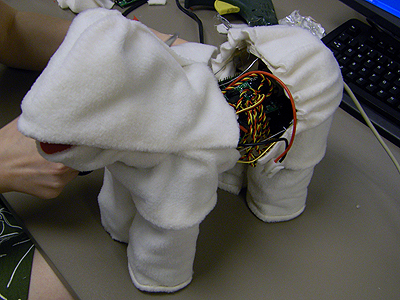
After learning the correct way to attach brackets to each other, and having a few failed attempts at making a pony rear up on stationary back legs (the hip servo was not strong enough to lift the front leg and head servos), we ended up creating a quadraped robot that could move all four legs. He consists of 15 servos: 12 for his legs (three on each - shoulder, knee, ankle), one for his tail, one for his neck, and one for his jaw.
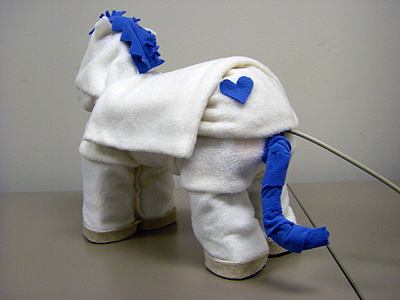
Using the VSA software, we manually programmed a walk cycle so that the pony can walk in a straight line while swaying his tail, bobbing his head, and moving his jaw to an audio file (using the same method used in the Talking Head project). Though we built him for the purpose of walking, he could potentially be programmed to perform actions like sitting, lying down, standing up, trotting, and digging with his front legs.
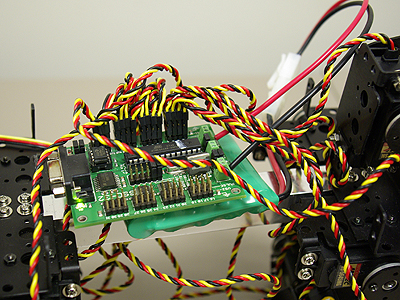
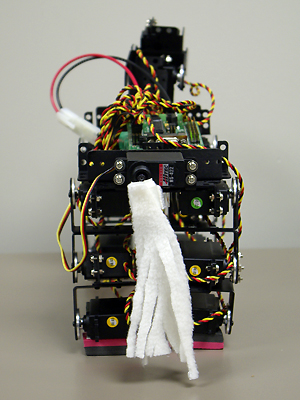
Pony: Uncovered
Images of the Walking Pony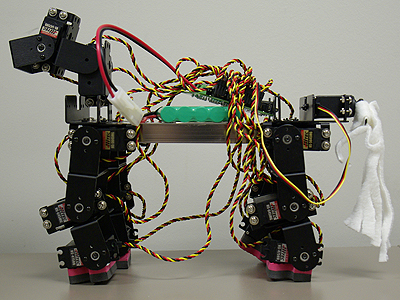
Video of the Walking Pony Uncovered
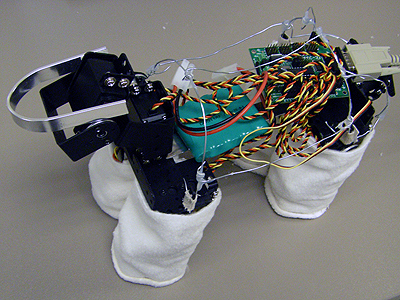
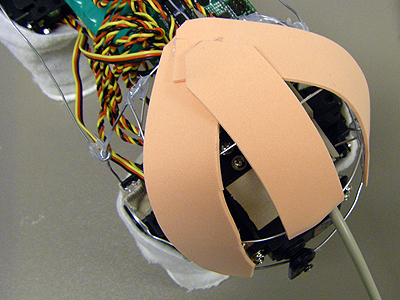
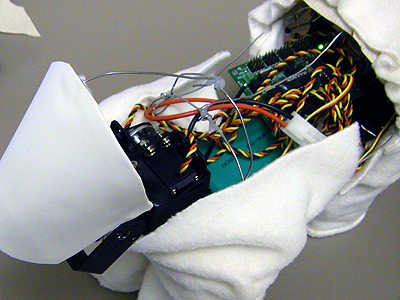
Pony: Covered








Video of the Walking Pony Covered