Matrices#
Табличный способ хранения данных чрезвычайно широко распространён, и если эти данные числовые, то с математической точки зрения они образуют матрицу — двумерный массив из чисел. Для эффективной обработки и анализа таких данных, а также обучения моделей машинного обучения на них, важно хорошо ориентироваться в матричных операциях и разложениях и их свойствах.
Матрицы принято обозначать заглавными жирными буквами: \(\boldsymbol A\), \(\boldsymbol B\), \(\boldsymbol C\), \(\boldsymbol X\), \(\boldsymbol Y\) и т.п. Множество матриц, имеющих \(m\) строк и \(n\) столбцов обозначается через \(\mathbb R^{m\times n}\). Элемент \(i\)-й строки и \(j\)-го столбца матрицы \(\boldsymbol A \in \mathbb R^{m\times n}\) будем обозначать \(A_{ij}\). Допустимо также обозначение \(a_{ij}\), особенно когда дело доходит до подробной записи
Эту же матрицу можно представить как набор строк или столбцов:
Если \(m=n\), то матрица \(\boldsymbol A\) называется квадратной, в противном случае — прямоугольной. Вектор \(\boldsymbol x \in \mathbb R^n\) можно считать матрицей размера \(n\times 1\) (столбец) или \(1\times n\) (строка).
Транспонированная матрица \(\boldsymbol A^\top \in \mathbb R^{n\times m}\) в качестве строк содержит столбцы матрицы \(\boldsymbol A\): \(A^\top_{ij} = A_{ji}\). В частности, вектор-столбец получается транспонированием из вектора-строки, и наоборот, чем и объясняется обозначение \(\boldsymbol x^\top\) для векторов-строк.
np.array can handle multidimenstional arrays including matrices. For example, let’s generate a random matrix of shape \(2\times 3\)
import numpy as np
A = np.random.rand(2, 3)
A
array([[0.08728969, 0.54601015, 0.72351181],
[0.96028496, 0.03162472, 0.2270256 ]])
For transposing use attribute .T:
A.T
array([[0.08728969, 0.96028496],
[0.54601015, 0.03162472],
[0.72351181, 0.2270256 ]])
Square matrices#
Квадратные матрицы \(\boldsymbol A \in \mathbb R^{n\times n}\) имеют одинаковое количество строк и столцов. Такие матрицы представляют особый интерес как в теории, так и на практике.
У квадратной матрицы есть две диагонали: главная и побочная.
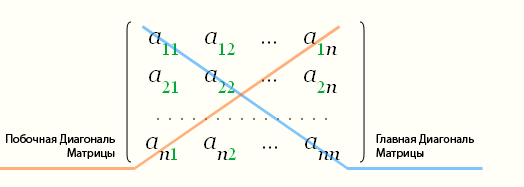
Сумма элементов главной диагонали называется следом матрицы: \(\mathrm{tr}(\boldsymbol A) = \sum\limits_{i=1}^n a_{ii}\).
Перечислим самые распространённые классы квадратных матриц.
Единичная матрица. Такая матрица содержит единицы на главной диагонали и нули вне неё; обозначается \(\boldsymbol I\) или \(\boldsymbol I_n\), если нужно подчеркнуть её размер:
\[\begin{split} \boldsymbol I_2 = \begin{pmatrix} 1 & 0 \\ 0 & 1 \\ \end{pmatrix}, \quad \boldsymbol I_3 = \begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \\ \end{pmatrix}, \quad \boldsymbol I_n = \begin{pmatrix} 1 & 0 & \dots & 0 \\ 0 & 1 & \dots & 0 \\ \vdots & \vdots & \ddots & \vdots \\ 0 & 0 &\dots & 1 \\ \end{pmatrix}. \end{split}\]Диагональная матрица. Все ненулевые элементы диагональной матрицы находятся на главной диагонали:
\[\begin{split} \boldsymbol \Lambda = \mathrm{diag}\{\lambda_1, \lambda_2, \ldots, \lambda_n\} = \begin{pmatrix} \lambda_1 & 0 & \dots & 0 \\ 0 & \lambda_2 & \dots & 0 \\ \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & \dots & \lambda_n \\ \end{pmatrix}. \end{split}\]Единичная матрица является частным случаем диагональной:
\[ \boldsymbol I = \mathrm{diag}\{1, 1, \dots, 1\}. \]Матрица перестановки. Такая матрица состоит из нулей и единиц, и содержит ровно одну единицу в каждой строке и в каждом столбце. Любая матрица перестановки получается некоторой перестановкой строк/столбцов единичной матрицы. Существует \(n!\) различных матриц перестановок размера \(n\times n\). Например, ниже перечислены все \(3!=6\) матрицы перестановок размера \(3\times3\):
\[\begin{split} \begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \\ \end{pmatrix}, \quad \begin{pmatrix} 1 & 0 & 0 \\ 0 & 0 & 1 \\ 0 & 1 & 0 \\ \end{pmatrix}, \quad \begin{pmatrix} 0 & 1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1 \\ \end{pmatrix}, \end{split}\]\[\begin{split} \begin{pmatrix} 0 & 1 & 0 \\ 0 & 0 & 1 \\ 1 & 0 & 0 \\ \end{pmatrix}, \quad \begin{pmatrix} 0 & 0 & 1 \\ 1 & 0 & 0 \\ 0 & 1 & 0 \\ \end{pmatrix}, \quad \begin{pmatrix} 0 & 0 & 1 \\ 0 & 1 & 0 \\ 1 & 0 & 0 \\ \end{pmatrix}. \end{split}\]Треугольные матрицы. У верхней треугольной матрицы \(\boldsymbol U\) все элементы ниже главной диагонали равны нулю: \(U_{ij} = 0\) при \(i > j\),
\[\begin{split} \boldsymbol U = \begin{pmatrix} u_1 & * & * & \dots & * \\ 0 & u_2 & * & \dots & * \\ 0 & 0 & u_3 & \dots & * \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & 0 & \dots & u_n \\ \end{pmatrix}. \end{split}\]У нижней треугольной матрицы \(\boldsymbol L\), наоборот, все элементы выше главной диагонали равны нулю: \(L_{ij} = 0\) при \(i < j\),
\[\begin{split} \boldsymbol L = \begin{pmatrix} \ell_1 & 0 & 0 & \dots & 0 \\ * & \ell_2 & 0 & \dots & 0 \\ * & * & \ell_3 & \dots & 0 \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ * & * & * & \dots & \ell_n \\ \end{pmatrix}. \end{split}\]Матрица \(\boldsymbol U\) верхняя треугольная тогда и только тогда, когда матрица \(\boldsymbol U^\top\) нижняя треугольная.
Симметричные матрицы. Квадратная матрица \(\boldsymbol A\) называется
симметричной, если \(\boldsymbol A^\top = \boldsymbol A\);
кососимметричной, если \(\boldsymbol A^\top = -\boldsymbol A\).
На главной диагонали кососимметричной матрицы всегда находятся нули. Всякая квадратная матрица \(\boldsymbol A\) может быть единственным образом представлена в виде суммы симметричной и кососимметричной матриц:
\[ \boldsymbol A = \frac{\boldsymbol A + \boldsymbol A^\top}2 + \frac{\boldsymbol A - \boldsymbol A^\top}2. \]Ортогональная матрица. Квадратная матрица \(\boldsymbol Q = [\boldsymbol q_1, \ldots, \boldsymbol q_n]\) ортогональная, если её столбцы образуют ортонормированную систему, т. е. \(\langle \boldsymbol q_i, \boldsymbol q_j\rangle = \delta_{ij}\), где \(\delta_{ij}\) — символ Кронекера{:target=”_blank”}.
Любая матрица перестановки является ортогональной. Также ортогональна, к примеру, матрица поворота на угол \(\theta\)
(29)#\[\begin{split}\boldsymbol Q = \begin{pmatrix} \cos \theta & -\sin\theta \\ \sin \theta & \cos\theta \\ \end{pmatrix}.\end{split}\]
Identity matrix in NumPy is created by np.eye:
I = np.eye(4, dtype=np.int32)
I
array([[1, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, 1, 0],
[0, 0, 0, 1]], dtype=int32)
np.diag can either create a diagonal matrix or extract the main diagonal of a matrix. Here we create a diagonal matrix:
D = np.diag([1, 2, 3])
D
array([[1, 0, 0],
[0, 2, 0],
[0, 0, 3]])
A = np.random.normal(size=(3, 3))
A
array([[-0.44717254, 1.4078295 , -0.6438964 ],
[ 0.30502598, 1.0711746 , 1.15591706],
[ 1.51407551, 1.83549146, -1.7051814 ]])
And here the extraction of the main diagonal happens:
np.diag(A)
array([-0.44717254, 1.0711746 , -1.7051814 ])
Matrix operations#
Перечислим поэлементные операции с матрицами. Пусть матрицы \(\boldsymbol A, \boldsymbol B \in \mathbb R^{m\times n}\), \(\alpha \in \mathbb R\), \(1 \leqslant i \leqslant m\), \(1\leqslant j \leqslant n\).
Сложение матриц:
Умножение матрицы на скаляр:
Поэлементное умножение (произведение Адамара) и деление матриц:
\[ \boldsymbol C = \boldsymbol A \odot \boldsymbol B \iff C_{ij} = A_{ij} B_{ij},\quad \boldsymbol D = \boldsymbol A \oslash \boldsymbol B \iff D_{ij} = \frac{A_{ij}}{B_{ij}} \](последнее возможно, разумеется, только если все элементы матрицы \(\boldsymbol B\) не равны нулю). Стоит отметить, что под произведением матриц обычно понимают совсем иную операцию, нежели поэлементное умножение, и о ней предстоит отдельный разговор.
Первые два свойства указывают на то, что матрицы можно рассматривать как вектора особого вида. Можно даже пойти дальше и записать матрицу размера \(m\times n\) в виде одномерного массива длины \(mn\) (например, построчно), и получится вектор в чистом виде. Такая операция применяется, к примеру, в свёрточных нейронных сетях, когда на определённом этапе представленная матрицей или тензором картинка выпрямляется (flatten) в вектор для дальнейшего прохождения через один или несколько полносвязных слоёв.
Matrix operations in NumPy are quite natrural:
A = np.random.randint(-2, 3, size=(2, 3))
B = np.arange(1, 7).reshape(2, 3)
print(A)
print(B)
[[ 0 -2 0]
[ 1 1 -1]]
[[1 2 3]
[4 5 6]]
A + B
array([[1, 0, 3],
[5, 6, 5]])
A - B
array([[-1, -4, -3],
[-3, -4, -7]])
A * B
array([[ 0, -4, 0],
[ 4, 5, -6]])
A / B
array([[ 0. , -1. , 0. ],
[ 0.25 , 0.2 , -0.16666667]])
Matrix-vector product#
Чтобы матрицу \(\boldsymbol A\) можно было умножить на вектор \(\boldsymbol x\), число её столбцов должно совпадать с размерностью вектора \(\boldsymbol x\). Если \(\boldsymbol A \in \mathbb R^{m\times n}\), \(\boldsymbol x \in \mathbb R^n\), то \(\boldsymbol A\boldsymbol x = \boldsymbol b \in \mathbb R^m\); координаты вектора \(\boldsymbol b\) вычисляются по формуле
По-другому можно сказать, что \(b_i = \boldsymbol a_i^\top \boldsymbol x\), где \(\boldsymbol a_i^\top\) — \(i\)-я строка матрицы \(\boldsymbol A\). Таким образом, для умножения матрицы на вектор требуется вычислить \(m\) скалярных произведений \(n\)-мерных векторов, поэтому сложность этих вычислений составляет \(O(mn)\). Если матрица \(\boldsymbol A\) квадратная размера \(n\times n\), то эта сложность равна \(O(n^2)\).
На матрично-векторное умножение можно взглянуть с другой стороны. А именно, если обозначить \(j\)-й столбец через \(\boldsymbol a_j\), то получается, что
Таким образом, вектор \(\boldsymbol b = \boldsymbol A\boldsymbol x\) является линейной комбинацией столбцов матрицы \(\boldsymbol A\) с координатами вектора \(\boldsymbol x\) в качестве коэффициентов.
Умножая матрицу на вектор-столбец, мы получаем снова вектор-столбец; умножение матрицы на вектор-строку записывают в обратном порядке:
Результат такого умножения представляет собой линейную комбинацию строк матрицы \(\boldsymbol A\): \(\boldsymbol c^\top = \sum\limits_{i=1}^m y_i \boldsymbol a_i^\top\).
Заметим, что матрицу \(\boldsymbol A\) размера \(1 \times n\) можно представить в виде вектора-строки \(\boldsymbol a^\top\). С другой стороны, согласно определению результат её умножения на вектор \(\boldsymbol x \in \mathbb R^n\) равен числу
а это в точности скалярное произведение \(\langle \boldsymbol a, \boldsymbol x\rangle\). Отсюда и проистекает его весьма популярное обозначение через матрично-векторное произведение \(\boldsymbol a^\top \boldsymbol x\), которым мы также будем активно пользоваться в дальнейшем.
Since matrix times vector operation is quite similar to inner products, the Python syntax is the same as here:
A = np.arange(9).reshape(3, -1)
b = np.array([2, 1, -1])
A
array([[0, 1, 2],
[3, 4, 5],
[6, 7, 8]])
A.dot(b), np.dot(A, b), A @ b
(array([-1, 5, 11]), array([-1, 5, 11]), array([-1, 5, 11]))
Matrix product#
Матрицу \(\boldsymbol A\) можно умножить на матрицу \(\boldsymbol B\), если количество столбцов матрицы \(\boldsymbol A\) равно числу строк матрицы \(\boldsymbol B\). А именно, произведением матриц \(\boldsymbol A \in\mathbb R^{m\times n}\) и \(\boldsymbol B \in\mathbb R^{n\times p}\) является матрица \(\boldsymbol C = \boldsymbol A \boldsymbol B \in\mathbb R^{m\times p}\), каждый элемент которой равен
Элементы матрицы \(\boldsymbol C\) можно записать в виде \(C_{ik} = \boldsymbol a_i^\top \boldsymbol b_k\), где \(\boldsymbol a_i^\top\) — строки матрицы \(\boldsymbol A\), а \(\boldsymbol b_k\) — столбцы матрицы \(\boldsymbol B\). Вычисление каждого элемента \(C_{ik}\) требует \(O(n)\) арифметических операций, поэтому общая сложность подсчёта произведения матриц составляет \(O(mnp)\). Если все матрицы квадратные размера \(n\times n\), то сложность будет \(O(n^3)\).
А быстрее можно?
Алгоритм Штрассена позволяет перемножать квадратные матрицы чуть быстрее, а именно за \(O(n^{\log_2 7})\), что примерно составляет \(O(n^{2.81})\). Алгоритм Штрассена был разработан ещё в 1969 году, и с тех пор было предложено множество алгоритмов с лучшей асимптотикой. Подробнее про эту гонку можно почитать в этой статье, где текущая SoTA указана как \(O(n^{2.3728596})\). Математики не оставляют надежд добиться асимптотики \(O(n^2)\) или хотя бы \(O(n^{2+\varepsilon})\) для любого сколь угодно малого \(\varepsilon > 0\), однако, все эти изыскания носят сугубо теоретический характер из-за гигантских констант в O-большом и сложности реализации подобных алгоритмов.
Впрочем, сегодня новые алгоритмы перемножения матриц придумывают не только математики, но и нейронные сети. Например, компания DeepMind с помощью глубокого обучения подкрепления разработала алгоритм AlphaTensor способный перемножать матрицы размера \(5\times 5\) эффективнее, чем алгоритм Штрассена (\(76\) умножений против \(80\)).
Произведение матриц \(\boldsymbol A \boldsymbol B\) можно представить также в виде набора столбцов, получающихся умножением матрицы \(\boldsymbol A\) на столбцы матрицы \(\boldsymbol B\): если \(\boldsymbol B = [\boldsymbol b_1 \ldots \boldsymbol b_p]\), то
Или же можно строки матрицы \(\boldsymbol A\) умножать на матрицу \(\boldsymbol B\): если
Свойства матричного умножения (предполагается, что размеры всех матриц согласованы)
\((\boldsymbol{AB})\boldsymbol{C} = \boldsymbol{A}(\boldsymbol{BC})\) (ассоциативность)
\((\boldsymbol A + \boldsymbol B)\boldsymbol{C} = \boldsymbol{AC} + \boldsymbol{BC}\), \(\boldsymbol{C}(\boldsymbol A + \boldsymbol B) = \boldsymbol{CA} + \boldsymbol{CB}\) (дистрибутивность)
\((\boldsymbol{AB})^\top = \boldsymbol B^\top \boldsymbol A^\top\)
\(\mathrm{tr}(\boldsymbol{AB}) = \mathrm{tr}(\boldsymbol{BA})\)
Последнее свойство обобщается до равенства \(\mathrm{tr}(\boldsymbol{ABС}) = \mathrm{tr}(\boldsymbol{СAB})\), которое справедливо для любого числа сомножителей с согласованными размерами. Это так называемое циклическое свойство следа матрицы.
Несколько дополнительных свойств для квадратных матриц:
\(\boldsymbol{AI} = \boldsymbol{IA} = \boldsymbol A\);
если \(\boldsymbol P\) — матрица перестановки, то матрица \(\boldsymbol{PA}\) получается из матрицы \(\boldsymbol A\) перестановкой строк, а матрица \(\boldsymbol{AP}\) — перестановкой столбцов;
произведение двух верхних (нижних) треугольных матриц тоже верхняя (нижняя) треугольная матрица;
если матрица \(\boldsymbol Q\) ортогональна, то \(\boldsymbol{QQ}^\top = \boldsymbol Q^\top \boldsymbol Q = \boldsymbol I\).
А вот коммутировать квадратные матрицы не обязаны: в общем случае \(\boldsymbol{AB} \ne \boldsymbol{BA}\) (поищите контрпример среди матриц размера \(2\times 2\)).
Квадратные матрицы можно возводить в натуральную степень так же, как и обычные числа. Вот, например, индуктивное определение степени матрицы:
Справедливы равенства
Можно даже пойти дальше, и определить взятие экспоненты или синуса от матрицы через ряд Тейлора:
(можно доказать, что эти ряды сходятся).
Замечание. В машинном (и особенно глубинном) обучении часто берут числовую функцию от матрицы, например \(\log(\boldsymbol A)\), \(\tanh(\boldsymbol A)\) или \(\sigma(\boldsymbol A)\), где \(\sigma(x) = \frac 1{1+e^{-x}}\) — сигмоида. Такая запись почти наверное подразумевает поэлементное применение функции к каждой ячейке матрицы \(\boldsymbol A\), а вовсе не матричные ряды! Тем более что матрицы в машинном обучении чаще всего прямоугольные, а для них нельзя определить ни степень, ни ряд.
Matrix product in NumPy is similar to that of vectors:
A = np.array([[1, 2, 3], [4, 5, 6]])
B = np.arange(12).reshape(3, 4)
print(A.shape, B.shape)
(2, 3) (3, 4)
A.dot(B)
array([[ 32, 38, 44, 50],
[ 68, 83, 98, 113]])
Exponent is elementwise:
np.exp(B)
array([[1.00000000e+00, 2.71828183e+00, 7.38905610e+00, 2.00855369e+01],
[5.45981500e+01, 1.48413159e+02, 4.03428793e+02, 1.09663316e+03],
[2.98095799e+03, 8.10308393e+03, 2.20264658e+04, 5.98741417e+04]])
One-rank matrix#
Одноранговая матрица задаётся произведением столбца на строку: \(\boldsymbol A = \boldsymbol {uv}^\top\), \(\boldsymbol u \in \mathbb R^m\), \(\boldsymbol v \in \mathbb R^n\). Элементы этой прямоугольной матрицы равны \(A_{ij} = u_i v_j\), а все её строки/столбцы пропорциональны. Отметим также, что если \(m=n\), то
Произведение матриц \(\boldsymbol A \in\mathbb R^{m\times n}\) и \(\boldsymbol B \in\mathbb R^{n\times p}\) можно записать в виде суммы одноранговых матриц:
В англоязычной литературе умножение столбца на строку \(\boldsymbol {uv}^\top\) называется outer product («внешнее произведение»), по аналогии со скалярным произведением \(\boldsymbol u^\top\boldsymbol v\), называемым inner product («внутреннее произведение»).
Block matrices#
Блочная матрица имеет вид
Контрольный вопрос. Каков будет результат транспонирования блочной матрицы
где \(\boldsymbol A \in \mathbb R^{k\times m}\), \(\boldsymbol B \in \mathbb R^{k\times n}\), \(\boldsymbol C \in \mathbb R^{\ell\times m}\), \(\boldsymbol D \in \mathbb R^{\ell\times n}\)?
Ответ
Блочные матрицы могут иметь произвольное число матричных блоков по каждому измерению. Интересно, что перемножать блочные матрицы можно по тем же правилам, что и матрицы из чисел, например
(при условии, что размеры матриц позволяют корректно произвести все матричные умножения).
Exercises#
Prove that the rotation matrix (29) is orthogonal.
Prove that any reflection matrix \(\boldsymbol I - 2\boldsymbol u \boldsymbol u^\top\), \(\boldsymbol u \in\mathbb R^n\), \(\Vert \boldsymbol u \Vert_2 = 1\), is orthogonal.
Prove that \(\mathrm{tr}(\boldsymbol{AB}) = \mathrm{tr}(\boldsymbol{BA})\).
Let \(\boldsymbol A\) and \(\boldsymbol B\) be two symmetric matrices of the same shape. Is their product is necessarily symmetric?